未来のオフロード観光交通:カワサキ「コルレオ」とATVおよび電動ローバーの比較
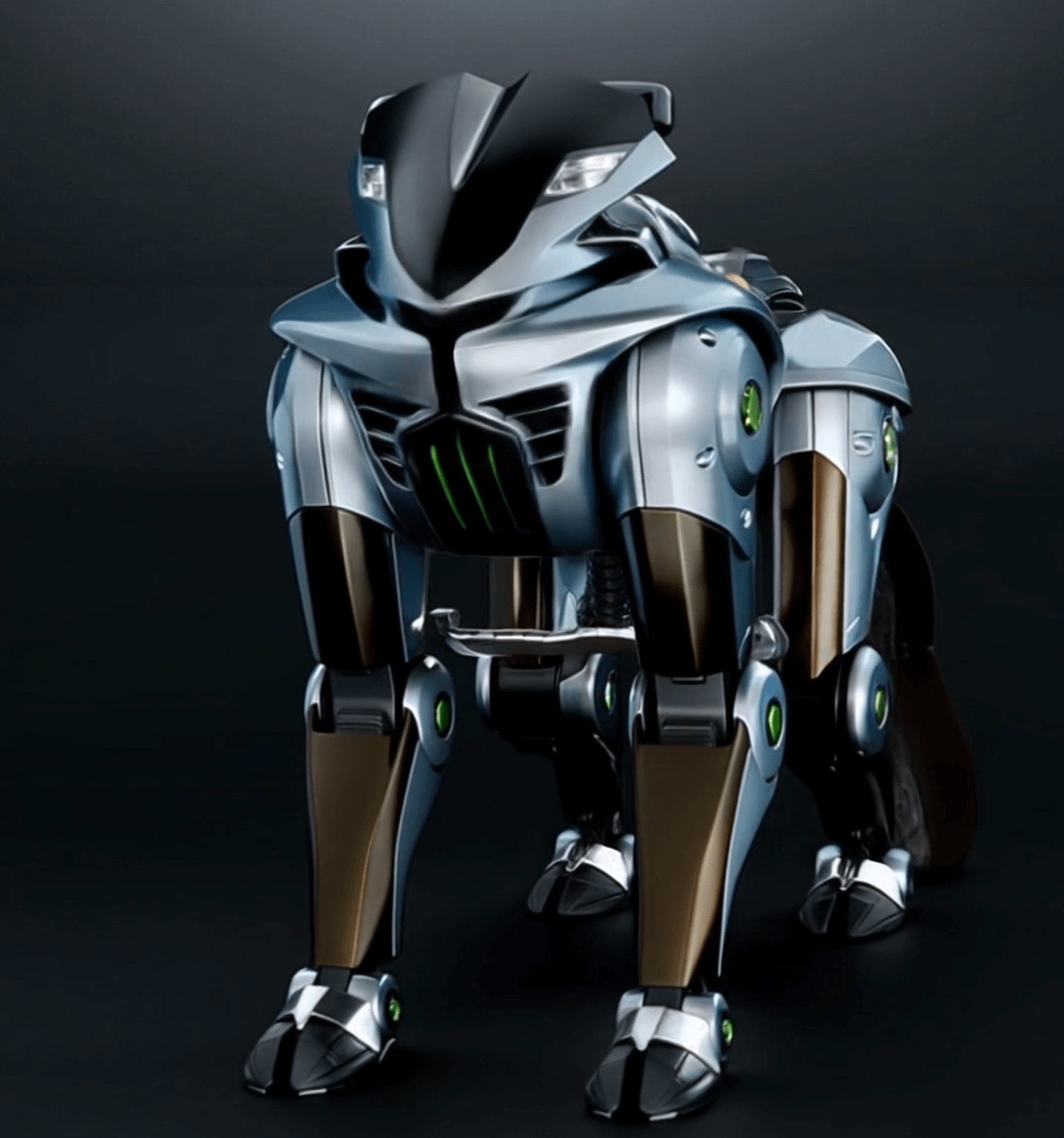
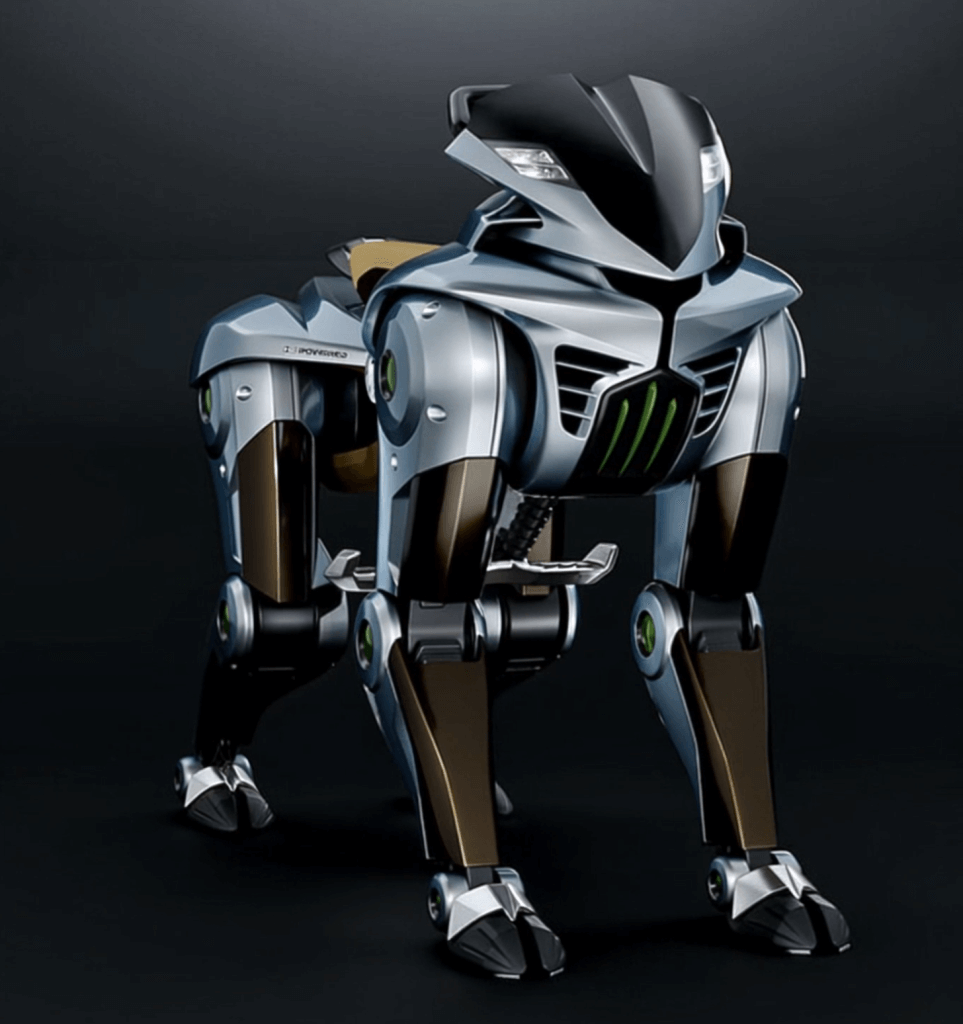
旅する なんち - 険しい山々や雪に覆われたツンドラから、砂の砂漠や都会の瓦礫まで、特殊な乗り物が必要とされる。従来型の全地形対応車(ATV)や新型の電動オフロードローバーは、このような環境でのアドベンチャー・ツーリズムに長年貢献してきた。カワサキの新しい コレオ コンセプト 四足歩行ロボット 2025年大阪万博で発表された「コレオ(コレオ)」は、これまでとは根本的に異なるアプローチを提示している。コレオは水素で動く機械仕掛けの「パックアニマル」で、4本の多関節脚と蹄のような足で歩行する。 山を征服し、険しい地形を踏破する ライダーを乗せながら本レポートでは、カワサキコルレオコンセプトと従来のATVおよび電動ローバーとの徹底的な比較分析を行い、ATVおよび電動ローバーとしての可能性を評価する。 将来の民間移管ソリューション 極限の地形における観光のためのものである。地形への適応性、コストとメンテナンス、持続可能性、キャパシティと快適性、安全性、技術的成熟度といった主要な基準について、ケーススタディや性能ベンチマークをもとに検証している。分かりやすいように、要約比較表も掲載されている。
地形適応性
急斜面、緩い砂地、凹凸のある岩場、氷雪、瓦礫の散乱した地面など、困難な地形にはさまざまな課題がある。車両の運動システム(車輪、トラック、脚)の適応性は極めて重要です。以下では、各ソリューションがどのように極端な地形に対応するかを比較する:
- カワサキ「コルレオ」(脚式ロボット): のために特別に設計された。 オールテレーン・モビリティコルレオは車輪の代わりに4本の独立した脚を持ち、歩いたり、登ったり、障害物を跨いだりすることができる。各脚には ラバーフット 芝生、砂利道、岩場など、さまざまな路面をグリップするために、分割して屈曲する。この脚のデザインは、凹凸のある地面でも安定性を維持し、急な傾斜や段差でもライダーの体を水平に保つことができる。事実上、コルレオは車輪のついた乗り物というよりも、確かな足取りで歩く群れ動物のような動きをする。そのため 車輪では登れない坂道や階段を登るまた、衝撃を吸収する脚部ジョイントが悪路に適応し、ライダーへの衝撃を軽減する。このため、極端に崩れた地形や高い障害物にも理論的には対応できる。しかし、平地でのスピードは車輪のある乗り物より落ちるかもしれないし、トリッキーな地面で4本の複雑な脚を制御するのは工学的に大きな挑戦である(現代自動車の同様の歩行車プロジェクトでは、多関節の脚をリアルタイムでスムーズに調整することの難しさが指摘されている)。
- 全地形対応車(ATV): ATVは 適度なオフロード走行に最適化 車輪(通常は4輪)とクリアランスの高いサスペンションを備えている。未舗装のトレイルや泥道、砂丘で優れた性能を発揮し、熟練したライダーであればかなり急な坂道も登ることができる。しかし、ホイール付きATVには 非常にラフな地形や垂直な地形での固有の限界.ATVは、車輪の直径よりも高い障害物を乗り越えたり、極端に壊れた地面を処理したりすることができない。深い隙間や瓦礫の山は、脚式ロボットなら通り抜けられる可能性があるATVを止めるかもしれない。急な斜面や凹凸のある斜面では、横転の危険がある。 体重移動 坂道や荒れた地面でバランスを保つために。オペレーターは次のことをお勧めします。 "急すぎる坂は登らない" 安全のために現実的な傾斜限界があることを強調している。緩い砂地では、ATVはトラクションや泥沼化で苦労することがある(特殊なサンドタイヤは助けになるが、回転するホイールは食い込む可能性がある)。氷や滑らかな岩の上では、スタッドレスタイヤがなくてもタイヤが滑ることがある。まとめると、ATVは以下を提供する。 トレイルや開けた地形での機動性に優れるしかし、ライダーの技量が要求され、脚式マシンのように極端な障害物(大きな岩や高い段差など)を乗り越えることはできない。
- 電動ローバー(輪行/追跡オフロードEV): 「電動ローバー」には、電気駆動を使用するオフロード車が含まれる。 4x4 battery-powered buggies への tracked exploration vehicles.その地形能力は、設計(タイヤ対トラック、サイズなど)によって異なる。多くの電動UTV(ユーティリティ・テレイン・ビークル)やオフロードEVは、トレイルや泥道、丘陵地ではガソリン車と同等の能力を発揮する。例えば、ポラリスの新型レンジャーXPキネティックは、14インチのクリアランスと従来のATVと同様の4WDを備えており、岩場や凸凹道に挑むことができる。大型 追跡型電動ローバー ヴェンチュリーは、柔らかい地面や雪の多い地面にも対応できる。 南極大陸 EV uses wide rubber tracks への distribute its 2.5-へのn weight over snow, preventing sink-in and maintaining traction on ice . Tracks excel in snow/sand and can clamber over smaller obstacles by brute force, though very large obstacles still pose a challenge. Wheeled rovers (like planetary rovers or 4x4 EVs) use advanced suspensions への keep wheels on the ground – e.g., NASA’s Mars rovers use rocker-bogie suspensions への climb over rocks roughly up への wheel diameter. But wheels, in general, will falter on 乱雑な瓦礫や高い棚.ヒュンダイのコンセプト エレベート アルティメット・モビリティ・ビークルは、車輪と、車輪を持ち上げて障害物を乗り越えることができるロボット脚を組み合わせることで、この問題に対処するもので、基本的には「止められない」不整地走破性を達成するためのハイブリッド・アプローチである。要約すると、現在の電動ローバーは、ほとんどの場合、障害物を乗り越えることができる。 ATVのようなアウトドアの地形 (ロッククローリング用の静かなトルクという利点もある)、特殊な設計(追従型または脚車輪のハイブリッド)は、さらに深雪や瓦礫のフィールドまで拡張することができる。しかし、本当に どこへでも 俊敏な動物に近づく能力は、動きの遅いロボットを除けば、現段階ではほとんど概念的なものにとどまっている。脚式ロボットは、原理的には以下の点で優位に立っている。 最も混沌とした地形一方、典型的なオフロード路面では、スピードと実用性の点で、車輪付き/追跡型車両が依然として優位を占めている。
ATVは依然として砂漠や山岳観光の人気者だ。砂丘やラフなトレイルはよくこなすが、極端に起伏の多い地形(写真はナミビアの大砂丘)では車輪に限界がある。斜面では横転を避けるため、ライダーは積極的に体重移動を行う必要がある。 .
コストとメンテナンスの可能性
どんな観光ソリューションにも、 コストとメンテナンスのしやすさ オペレータは、十分に手頃な価格で配備でき、遠隔地でも稼働させ続けることができる車両を必要としている。この3つを比較してみよう:
- カワサキ・コルレオ(脚式ロボット): 未来的なコンセプトとして、コルレオは現在 はるかに複雑で高価 従来の自動車よりも。カワサキは価格を発表していないが(しかも1回限りのコンセプトであるため非売品)、同様のロボットから推測することができる。例えば、ボストン・ダイナミクスの小型で乗れないロボット犬「スポット」は、約30万円で販売されている。 $74,500 それぞれ。コルレオのような乗用脚式ビークルは、より頑丈なアクチュエータ、堅牢なシャーシ、高度な制御システムを必要とするため、コストが大幅に上昇する可能性が高い。 1台あたり数十万ドル (少なくとも開発初期は)。メンテナンスも難しいだろう:コルレオには多くの可動部品がある(4本の脚×複数の関節、蹄とあぶみのセンサー、水素エンジンなど)。各関節やアクチュエーターは故障や摩耗の可能性があり、このようなロボットのメンテナンスには専門の技術者が必要となる。過酷な使用において 脚機構の損傷 ATVの車軸が折れた場合などと比べて、現場での修理が困難になる可能性がある。一方、コルレオの水素電気パワートレインは、ガソリンエンジン(150ccの水素エンジンが発電機を駆動する)よりも可動エンジン部品が少ないが、複雑さは運動システムにシフトする。要するに、コルレオのような脚式乗り物は 現時点ではコスト的に難しい そしてメンテナンスに手間がかかる。技術が進歩し、2050年までに大量生産されるようになれば、規模の経済で改善される可能性はあるが、脚を使ったモビリティ特有の複雑さがあるため、単純なバギーのように安価に所有できるようになることはないだろう。
- ATV(全地形対応車): ATVは 成熟した大量生産技術そしてそのコストは比較的低い。2023年の新車のATVは、通常以下の価格帯である。 $6,000~$16,000 USD (希望小売価格)。中古モデルやベーシックモデルはさらに安く、ツアーオペレーターや個人でも入手しやすくなっている。ATVのメンテナンスは一般的に簡単で、オートバイのようなガソリンエンジン(場合によってはディーゼル)、機械式トランスミッション、サスペンションシステムを使用しているため、小型エンジンの整備士なら誰でも整備できる。スペアパーツ(タイヤ、ブレーキ、エンジン部品)は広く入手可能で、価格も手ごろだ。しかし、ATVには定期的なメンテナンスが必要だ。エンジンにはオイル交換やエアフィルターなどが必要だし、オフロードで使用する部品(アクスルやサスペンションアームなど)には大きなストレスがかかるため、悪路を激しく走ると壊れる可能性がある。それでも、ハイテクロボットと比較すれば、ATVは 現場での修理が容易ツアー会社は、一般的なスペアをストックし、修理のためにスタッフを訓練することができる。四輪バギーはシンプルでどこにでもあるため、その利便性は高い。 費用便益比 現在の観光業には非常に有利である。新興の電動ATV(ポラリス、DRRなど)も、シンプルな設計を目指しており、基本的にエンジンをバッテリーとモーターに置き換えているため、メンテナンスは同等か、よりシンプルである(電動モーターは可動部品が少ない)。まとめると、ATVは以下を提供する。 高い実現可能性 オフロード走行のためのコストとメンテナンスの面で、脚式ロボットはフリートとして配備できるほど安価で、基本的な工具で整備できるほど頑丈である。
- 電気ローバー(オフロードEV): このカテゴリーには、オフロード電気自動車/UTVや特殊車両も含まれるため、コストはさまざまだ。 民生用電動UTV (ポラリス・レンジャーXPキネティック(3人乗りオフロードEV)のようなユーティリティ・サイド・バイ・サイドの価格は、約1,000万円である。 $25,000–$30,000 この価格は、同等のガス式ATV(同等のガス式Ranger XP 1000は$2万円前後から)よりも高い。これらの価格は、同等のガス式ATV(同等のガス式レンジャーXP 1000は約$2万円から)よりも高く、主に高価なバッテリーパックが原因である。しかし、運用コスト(電気代対燃料代、エンジンのメンテナンス頻度の低さ)は低く、使用頻度の高いオペレーターにとっては、長期的にバランスが取れる可能性がある。 メンテナンスの必要性 エンジンオイルやスパークプラグを交換する必要がなく、直接電気駆動の場合はドライブトレインの部品点数も少ない。そのため、日常的なメンテナンスを減らすことができる。しかし バッテリーと電気系統 バッテリーの劣化(何年かすると交換が必要になり、コストがかかる)、充電インフラや予備のバッテリーパックの必要性などだ。人里離れた観光地では、ソーラーシステムや発電機を設置しない限り、充電は難しい。次のような問題がある。 特殊電動ローバー (ヴェンチュリーの南極大陸やその他の探査用EVのプロトタイプのように)コストは非常に高く、しばしば数十万ドルのオーダーメード・プロジェクトとなり、市販はされない。これらの車両は、高度なシステム(軌道メカニズム、極寒下でのバッテリーの熱管理など)を維持するために熟練したエンジニアを必要とする。やがて電気オフロード車が一般的になれば、コストは下がり、メンテナンスはメカニックによく理解されるようになると予想される(現在、消費者向け自動車市場でEVがそうであるように)。まとめると 電気ローバーは、脚式ロボットよりもすでに手頃な価格で入手可能である。ただし、単純なガス式ATVよりも割高になる。特に市販モデルの場合、メンテナンスは一般的に管理しやすいが、充電のためのインフラを考慮する必要がある。従来のATVよりも高価でハイテクだが、実験的な脚式マシンよりははるかにシンプルで安価である。
持続可能性と環境への影響
環境の持続可能性は、観光、特に自然や脆弱な環境における優先事項として高まっている。この基準は、車両の排気ガス、騒音、地形/野生生物への物理的影響に着目している。
- カワサキ・コルレオ(水素脚自動車): コルレオは、環境との調和を念頭に置いて考案された。 150cc水素エンジンで発電 つまり、脚部モーターの動作は 低排出ガスで静か.水素燃料で走行する場合、燃焼による副産物は水だけである(水素内燃機関または燃料電池を想定、川崎重工は発電機能付き水素エンジンと表現している)。その結果 温室効果ガスをほぼゼロに ガソリンエンジンとは異なり、使用時点で。デザインは 「本能、テクノロジー、自然環境がシンクロする - 実用面では、このロボットの静かな電動アクチュエーターとエンジンの唸り音がないため、大音量のATVよりも野生動物の邪魔にならない。夜間の使用に関しては、明るいヘッドライトを常時点灯させる代わりに地面にライトを投射し、周囲への光害を最小限に抑えることさえできる。物理的な影響という点では、問題はもっと複雑だ:コルレオの4本の足は、1歩ごとに小さな蹄の部分に体重を集中させるため、次のような問題を引き起こす可能性がある。 点荷重 土の上で。しかし、動物のように一度に狭い範囲にしか接触しないため、回転する車輪や足跡のように継続的に地面を掘り返すことはない。これにより、持続的なダメージが軽減される可能性がある。足で踏む間に地面が落ち着く時間があるからだ。一方、500ポンド以上のロボットが柔らかい土を踏むと、(馬が小道で踏むのと同じように)蹄の跡が残る可能性がある。全体として、コルレオの 環境への影響 排出ガスと騒音という点では模範的で、事実上ゼロ・エミッションで騒音も非常に小さい。タイヤで土壌を切り裂くわけではないので、物理的なフットプリントは同程度に重いATVよりも優しいと思われるが、これには実環境でのテストが必要だ。水素を燃料として使用する場合、水素の調達に問題が生じる。水素は(できれば環境に優しい方法で)製造され、輸送される必要があり、遠隔地での燃料補給インフラは現在のところ存在しない。 コンセプト は明らかに持続可能性を目指している。
- 全地形対応車(ATV): 従来のATVはガソリンを燃料として走行する。 環境面での重大な欠点.排気汚染物質(CO、NOx、未燃炭化水素)やCO₂を排出し、大気汚染や気候変動の原因となっている。古いモデルの)2ストローク・エンジンは特に汚れている。新しい4ストローク・エンジンはよりクリーンだが、それでもカーボンを排出する。排ガス以外にも、ATVは多くのCO₂を排出する。 ノイズ - エンジン音や排気音は、開けた自然の中を遠くまで伝わり、野生動物や自然の静けさを妨げる。研究や環境保護団体は、ATVが以下のような問題を引き起こしていると指摘している。 騒音障害と植生への被害野生動物のストレスと生息地の破壊につながる。ATVの重い重量と攻撃的なタイヤもまた、野生動物にストレスを与えている。 土壌を圧縮し、浸食を引き起こす 整地されていない土地で:ATVの400~600ポンド以上の重量が小さなタイヤの接地面を圧迫するため、土壌から空気が搾り出され、透水性が低下する可能性がある。ATVの400~600ポンド以上の重量が小さなタイヤの接地面を圧迫するため、土壌の空気が圧迫され、透水性が低下する。この圧縮と轍のあるトレイルの形成により、流出が増加し、近隣の河川の水質が悪化する可能性がある(土砂が水路に運ばれる)。確かに、 「ATVの影響には、騒音障害、植生の損傷、流出水の増加、土壌浸食、水質の悪化が含まれる。その結果、野生生物の生息地に悪影響を及ぼす。多くの場所では、こうした影響を緩和するために、ATVの使用が規制または制限されている。持続可能性の観点からは、ガソリンATVは 不調者 - 大気を汚染し、しばしば土地も汚染する。しかし、業界は次のように対応している。 電動ATVおよびUTV より環境に優しい選択肢として。電動ATVは以下を生み出す。 排気ガスゼロ、騒音も大幅に低減排気ガスを出さずに、野生動物の邪魔をすることなくアドベンチャー・ツアーを楽しむことができる。例えば、電動ATVやサイド・バイ・サイドは、動物を怖がらせることなく、静かに観光客を森に運ぶことができる。また、これらの電動モデルは、燃料をこぼすリスクもない(ガソリンが漏れる可能性がない)。唯一の注意点は、発電とバッテリーの生産にかかる環境フットプリントを考慮する必要があることだが、再生可能な資源から充電すれば 経営への影響は最小限.要約すると 現在のATVは環境に大きな影響を与えているしかし、電気ドライブトレインに移行することで、持続可能性を大幅に向上させることができ、環境に優しいという点では電気ローバーに匹敵するようになる。
- 電気ローバー(オフロードEV): 電動ローバーは一般的に 持続可能性の高い運営.電気自動車である。 ゼロ・テールパイプ・エミッション - を排出しない。このため、手つかずの自然環境や、エンジンガスが危険な閉鎖環境(洞窟や氷のトンネルなど)での使用に適している。また ずっと静か 電気モーターが発する騒音はごくわずかだ(タイヤが地面に接地する音を除けば)。この静粛性は、野生生物にとっても、静かな自然体験を求める観光客にとっても大きな利点となる。具体的な例としては、ヴェンチュリーの南極探査機がある。 "世界初のゼロ・エミッション極地探査車"ヴェンチュリーEVは、その脆弱な生態系における汚染を避けるために南極に配備された。2022年の夏、ヴェンチュリーEVは科学者を乗せ、南極の地形を500km走破しました。 ゼロ emissions and far less ノイズ than diesel tracへのrs . In terms of physical impact, electric rovers on wheels or tracks have similar effects as their gas counterparts – so a heavy electric 4x4 can still tear up soft ground if driven aggressively. However, many electric off-road vehicles use トラックまたは複数の大型タイヤ that spread out the load. The Venturi’s tracks, for instance, spread its 5,500 lb weight evenly so it can travel on snow without sinking . That broad contact prevents deep ruts; on tundra or desert sand, a tracked or 4x4 EV would not necessarily be any gentler than an ATV ない限り 低地圧用に設計されている。EVの利点のひとつは、トルクをより細かく制御できることだ。電動ドライブトレインはパワーを非常にスムーズに調節できるため、車輪の空転や、それに伴う敏感な地面での侵食を軽減できる可能性がある。また、オイルや燃料などの液体が垂れないため、土壌や水を汚染するリスクが少ない。ライフサイクルの観点から見ると、電気ローバーの持続可能性はバッテリーの生産と電力源に依存するが、多くの観光事業では、EVと再生可能エネルギーの充電(ベースキャンプでの太陽光発電など)を組み合わせ、真に環境に優しいプロフィールを確保している。まとめると 電気ローバーは環境への影響を大幅に改善する ガソリンATVに比べ、直接的な排気ガスがなく、低騒音で、適切な設計により物理的な地形へのダメージを最小限に抑えることができる。エコツーリズムや研究(サイレント・サファリ・ビークルや極地ステーションへの輸送など)において、最小限の妨害でアクセスできるよう、すでに採用されている。技術の進歩に伴い、その航続距離と性能は向上しており、持続可能性と能力は両立している。
ヴェンチュリーの "南極 "電気ローバーは、極限の地形用に作られたゼロ・エミッション車だ。そのツイントラックは、雪に沈まないように重量を分散し、密閉されたキャビンは氷点下の条件下で最大6人を運ぶ。 .このケースは、電気自動車が生態系への影響を最小限に抑えながら、過酷な環境にも対応できることを示している。
乗客定員と快適性
さまざまなソリューションが、さまざまな定員(乗客数)と快適性のレベルを提供する。これは、過酷な地形でも安全でそれなりに快適な乗り心地を期待する観光客にとって重要なことだ。
- 川崎コルレオ コルレオのコンセプトは本質的に 一人乗りオートバイや機械仕掛けの馬に似ている。鞍のようなシート、ハンドル、鐙(あぶみ)が特徴で、一人乗りだ。一頭の馬に二人乗りはできないのと同じだ(実際、ATVの安全ガイドラインでは、一人乗りのATVに乗客を乗せることは推奨されていない)。観光のシナリオでは、家族で1台の車を共有するのではなく、各旅行者が自分のコルレオユニットに乗ることを意味する(ガイドが別のユニットを先導することもある)。また くつろぎコルレオは、ATVで一般的に感じられる荒々しさを克服することを目指している。レッグサスペンションシステムとダイナミックバランスにより、段差や傾斜のある場所でもスムーズな乗り心地を維持する。 水平で正面を向く 昇り降りするときでさえも。各脚の衝撃吸収スイングアームが段差の衝撃を和らげ、理論的には車輪のある乗り物(タイヤが穴に落ちると揺れる)よりも岩や穴の上をスムーズに走ることができる。その エルゴノミクス あぶみはライダーが最適な姿勢を保てるように調整され、疲労を軽減する。カワサキは、人間とマシンのつながりを次のように表現している。 「タイト 直感的で、ほとんどライダーの体の延長のようだ。このことは、快適さが単に物理的なもの(振動や揺れが少ない)だけでなく、心理的なものであることを示唆している。 "より本能的で、ほとんど動物的な、新しいタイプの乗車体験" 観光客にとってはスリリングかもしれない。ただし、脚のついた乗り物でスピードを出したときの乗り心地は未検証であることに注意が必要だ。トロットやギャロップのような動きでは、まだ跳ねるかもしれない。コルレオのビデオ(コンセプトCGI)では、ライダーが 高速走行時のジョッキーのようなしゃがみ方 動きを吸収する。本物の馬やダートバイクに乗るようなもので、冒険の一部にはなり得るが、車のシートに座るよりは「豪華」ではない。オープンエアなので、ライダーは四輪バギーや馬に乗っているときと同じように要素(風、雨、気温)に直面する。穏やかなコンディションであれば問題ないが、極端な寒さや暑さでは快適さに限界がある。全体として、コルレオは以下を提供する。 ユニークで魅力的な一人乗り受動的な豪華さよりも、(適応的な動きと人間工学に基づく)能動的な快適さに重点を置いている。それは、密閉されたローバーというよりも、スポーツ/アドベンチャー体験(オートバイや乗馬)に匹敵する。
- ATV: ほとんどのATVは 単車 (四輪バイクのような)またぎ式のシート。延長シートやパッセンジャー用の追加グラブレールを備えた2人乗り(タンデム)として設計されたモデルもあるが、多くの安全専門家やメーカーは、安定性の問題から標準的なATVにパッセンジャーを乗せないよう警告している。ガイド付きツアーでは、通常、各自が自分のATVを持つか、管理された状況で大人と子供がタンデムATVを使用することもある。 ATVの快適性 ATVは一般に、よりラフで実用的な乗り物である。ライダーは天候にさらされて座り、ATVにはサスペンションがあるとはいえ、岩や轍の上を走るのは衝撃的だ。ライダーはしばしばフットペグを踏んだり、段差を乗り越える際に足をショックアブソーバーとして使う必要がある(オフロードバイクでは経験豊富なテクニック)。シートは通常パッド入りだが、それほど深くはなく、豪華さよりもコントロール性を重視して設計されている。ATVはエンジンの振動と体を支える必要があるため、長時間の乗車は疲れる。ATVにはハンドルがないため、低速でハンドルを切るには力が必要で(多くのモデルにはパワーステアリングがない)、トリッキーな地面をコントロールするには繊細さが要求される。また 乗客の快適性一般的に1人乗りであるため、相乗りの体験はなく、全員が自分で運転できなければならない。しかし、バリエーションもある: サイドバイサイドUTV (同じクラスとみなされることの多いユーティリティ・テレイン・ビークル)は、2~4人、場合によってはそれ以上の乗車が可能で、ハンドルとシートベルトが装備されている。サイド・バイ・サイドはより快適で(バケットシート、時にはルーフやフロントガラスがある)、多人数乗車が可能なので、ファミリーツアーに人気がある。本当のATVクワッドバイクに限定すれば、快適性はスリルや操縦性の二の次だ。 アクティブライド.ライダーは埃や枝から身を守るためにヘルメットとゴーグルを着用する。暑い砂漠や寒い地域では、適切な装備(日焼け防止、防寒着など)が必要だ。プラス面では、ATVは以下を与えてくれる。 探検の自由 ライダーは地形の感覚を楽しむことが多い(砂丘の起伏を感じるなど)。観光業者にとってATVは、アドベンチャー・ツーリズムでよく受け入れられるような楽な乗り物ではなく、険しい体験を提供するものと見なされることもある。まとめると、ATVは 一人乗りミニマムコンフォート車 - アドレナリンを出し、地形と直接触れ合うには最高だが、避難場所や優しさはない。新しいモデルは少し改良されているが(パワーステアリングやサスペンションのチューニングが改良されたものもある)、快適性という点では、車に乗っているというより自転車に乗っているのに近い。
- 電動ローバー 電動ローバー、特に人を乗せることを目的としたローバーは、一般的に最高のものを提供する。 乗客定員と快適性 このような選択肢のオフロードEVの多くは、小型電気自動車やシャトルとして作られている。例えば、ヴェンチュリー・アンタークティカは、以下のものを運ぶことができる。 6名まで 折りたたみ式のベンチシートがあり、装備を収納するスペースもある。それほど極端な環境でない場合、電動ローバーはジープ・サイズの車やサイド・バイ・サイドのUTVのようなものになるかもしれない。シートベルト付きの2~4人乗りで、場合によってはロールケージやルーフがあるかもしれない。電動ドライブトレインはコンパクトなので、革新的なレイアウトも可能だ(あるコンセプトUTVでは、小型モーターを活かした「コンバーチブル」座席配置も提案されている)。困難な地形での観光には、電動ローバーが有効だろう。 多人数シャトル これは、少人数でトレイルを走るもので、全員が別々のATVやロボットに乗るのとはまったく違う体験だ。 快適性 背もたれのある適切なシート、普通に座ったままでいられること(四輪バギーに乗るときのような絶え間ない体位変換は必要ない)、風雨から保護されること(フロントガラス、ルーフ、デザインによってはドア)。電気自動車にはエンジンの振動もないため、乗り心地はより静かでスムーズだ(足元でモーター音が鳴ることもない)。エンジン音がないため、同乗者と会話をしたり、ツアー中にガイドの話に耳を傾けたりするのが容易になる。これらのローバーのサスペンションは、傾きを心配することなくソフトにすることができる(ドライバーはATVのように積極的にバランスをとるわけではないので)。例えば、ポラリス・レンジャーEVのサスペンションは、3人が乗っても段差をうまく吸収することができる従来型のもので、将来の電動サファリトラックは、先進的なショックアブソーバーを搭載し、悪路でも比較的滑らかな乗り心地を実現することが想像できる。その マイナス面 非常に起伏の激しい地形では、(車輪やトラックの)ローバーは地形に合わせて傾くため、障害物を乗り越える際に乗客が揺さぶられる可能性がある。 可能性がある 車体をより水平に保つ。また、大型のローバーは一人乗りマシンのように狭い場所で簡単に操縦することができないので、最も壊れやすい地面を避けることができるかもしれない(そのため、いずれにせよ同乗者を危険にさらすことはない)。総合的に見て、快適性と定員、 電気式ローバーは明らかに優れている複数の観光客を一緒に運ぶことができ(家族や自分で運転できない人に便利)、比較的快適で安全な乗り心地を提供する。過酷な環境(炎天下、極寒)では、密閉されたローバーは、日陰、空調、地形からの保護(例えば、頑丈なケージで横転による怪我を防ぐ)を提供し、命を救うことができる。このため、ローバーはあまり冒険的でない観光客や長期の小旅行に非常に適している。ローバーは、快適さと包括性(ATVや機械式馬を扱うのに十分な体力のある人だけでなく、誰でも参加できる)と引き換えに、極端な敏捷性を効果的に提供している。観光事業者にとっては、潜在的な客層を広げ、責任を軽減できる(監督する個々の車両が少なくて済む)という点で魅力的だ。まとめると 乗客体験 ATVやコルレオがより生々しく、個人的なアドベンチャー体験を提供するのに対し、電動ローバーでの移動は、より安全で、より簡単で、より快適なオフロード自動車旅行に似ている。
安全性と信頼性
観光事業では安全性が最も重要であり、車両はライダーを怪我から守り、危険な場所で故障してはならない。また、技術の信頼性も存続に不可欠である。ここでは、既知の安全性と信頼性の側面を比較する:
- カワサキ・コルレオ(脚式ロボット): プロトタイプのコンセプトである。 実世界の安全性 はほとんどテストされていない。しかし、このデザインには安全面で長所と短所がある。プラス面では、コルレオの4本脚の姿勢は非常に安定している。4本脚のテーブルのように、片脚が一瞬滑っても直立を保つことができる。川崎重工によれば、ロボット工学はバランスの変化にミリ秒単位で反応できる。 「ライダーの動きをモニターし続ける を維持するためである。 "人間と機械の心強い一体感" そして安定性。理論的には、これは多くの事故を防ぐことができる。例えば、ATVが転倒してライダーを放り投げるかもしれないが、コルレオは自動的に姿勢を直立に保つように調整し、ライダーの負担を軽減するかもしれない。また、最高速度は中程度(おそらく走る速度に匹敵する)だろうから、衝突時の運動エネルギーは高速バギーの事故よりも小さいだろう。次に懸念されるのは、脚式ロボットがバランスを崩したり故障したりした場合、落下が予測不可能になることだ。片側に傾きがちな車輪付きの乗り物とは異なり、四足歩行ロボットは、制御システムが故障した場合、ひょいと倒れ、乗り手を押しつぶしたり、挟み込んだりする可能性がある。ロールケージやシートベルトはなく、ライダーは基本的にマシンにまたがっている。理想的には自由に飛び降りることができるが、それは反応と落下の性質による。もう一つの問題は ライダースキル - センサーは多くのことを行うが、コルレオに乗るには(馬やセグウェイの乗り方を学ぶのと同じように)学習曲線があるかもしれない。自律安定性が完成するまでは、初心者が間違った方向に傾いたり、不安定になるような入力をしたりする可能性がある。 信頼性 電子機器やアクチュエーターは埃や泥、衝撃、天候に耐えなければならない。センサーが泥だらけになったり、脚のモーターが過熱したりすれば、ロボットは故障するかもしれない。現在のところ、このコンセプトは完全には機能していない(2025年の万博では、展示されていたユニットはゆっくりとポーズをとることができただけで、ダイナミックな「疾走」はCGIのデモだった)。 "展示されたコルレオは...非常に限られた機動性しかない...展示された俊敏性を達成するには、まだ長い道のりがある...生産の予定はない" .これは、信頼性と堅牢性が 証明されたとは言い難い.それに比べ、脚式ロボットの軍事試験(ボストン・ダイナミクスのLS3 BigDogなど)は、印象的な悪路走破性を示したが、実用上の問題が明らかになった。 うるさいそのような状況では、これは破格である。コルレオは水素電力で騒音に対処するが、大雨にどう対処するか、足が詰まったらどうなるかはわからない。今のところは、 コルレオの安全性は理論的なものだ - 横転は減るかもしれないが、新しい故障モードが導入される。ライダーを不注意で転倒させないことを証明するには、(おそらくダミーライダーを使った)大規模なテストが必要だろう。観光の文脈では、緊急事態も心配される。急斜面でロボットが停止した場合、ライダーは安全に降りることができるのか、それとも落下してしまうのか?このような問題から、コルレオや類似のロボットには次のようなことが必要になるだろう。 長年の開発 川崎重工のビジョンは、2050年までには消費者に安全な自動車を提供できるという自信に満ちている。カワサキのビジョンは、2050年までに消費者にとって安全な自動車を実現できるという自信を暗示しているが、それまでは実験的なアプローチにとどまる。
- ATV: ATVの安全性については、さまざまな実績がある。それは 事故がち 注意深く使用しなければ。よくある危険には、横転、衝突、放出などがある。米国では、毎年数千人がATV事故で負傷し、数百人が死亡している。ATVには ホイールベースに対して重心が高い後輪にディファレンシャルがないため(多くのモデルで)、スピードが出れば急旋回で簡単にひっくり返る。また、舗装された路面には適していない。舗装路で曲がると、タイヤが引っかかってひっくり返る可能性がある(そのため、一般に公道での走行は違法とされている)。観光客にとっての主なリスクは 斜面や不整地での横転.横からの坂道でライダーが正しく体を傾けなかったり、急な上り坂でスロットルをガンガン踏み込んだりすると、ATVは横転する可能性がある。自動車と異なり、ATVには密閉された保護装置がない。一般的にシートベルトはなく、ロールケージもない。横転によってライダーが投げ出されたり、ATVがライダーの上に着地して重傷を負ったりすることもある(ヘルメットを着用していない場合、頭部を負傷することが多い)。ヘルメット、トレーニング、ガイド付き操作などの安全対策は、こうしたリスクを軽減するのに役立つ。最近のATVは安定性が多少改善され、過度の傾きに対する警告インジケータが付いたものもあるが、安全に乗るには積極的な技術が必要であることに変わりはない。もうひとつの問題は ライダー誤用 - 例えば、1人乗りのATVに同乗者を乗せるとバランスが大きく崩れ、転倒しやすくなる。 「ATVに同乗者を乗せてはならない ).信頼性の面では、ATVは一般的に 信頼性の高い機械 パンク、エンジン停止、機械部品の破損などだ。しかし、これらは通常、修理や交換が簡単で、よく理解されている。トレイルに出れば、ガイドが壊れたATVを牽引して戻したり、迅速な修理(予備のドライブベルトなどを携行)ができることも多い。ほとんど ソフトウェア 基本的なATVでは、不具合が発生することはない。このシンプルさは、遠隔地では信頼性の利点となる(混乱するセンサーなどがない、ただし最近のATVには燃料噴射などのために電子機器が搭載されているものもある)。まとめ、 ATVはライダーに高い事故リスクをもたらす (特に初心者は)安定性に限界があり、大怪我をすることはよく知られている問題です。しかし、それらはまた 信頼と実績の車両 - 一般的に、ATVはその癖を熟知しており、注意深くメンテナンスすれば、確実に仕事をこなしてくれる。ツアーオペレーターの立場からすれば、ATVの安全管理とは、ルール(ヘルメット、速度制限、無謀な移動の禁止)を徹底し、定期的な整備点検を行うことである。リスクは些細なものではないが、多くの冒険旅行者が受け入れているリスクであることは理解できる。
- 電動ローバー 電動ローバー(オフロードEVバギーや追従型車両のようなもの)の安全性は、ATVに比べて乗員にとって高い傾向にある。まず 安定性 より広いスタンス、より低い重心(特にバッテリーがフロア内にある場合)、時にはロールケージや囲いの存在。多くの電動UTVには、乗員ごとにロールバーとシートベルトが内蔵されており、横転時に放出されたり重傷を負ったりする可能性を大幅に減らしている。多人数乗りのローバーは、よりクルマに近い感覚で運転できる。ドライバーは転倒を避けるために体重を移動させる必要がないため、ヒューマンエラーによる転倒の可能性が本質的に低くなる。例えば、電動サイド・バイ・サイドは、重心が低く、ディファレンシャル・ステアリングを採用しているため、ATVのような転倒の危険性がなく、適度な旋回が可能だ。ヴェンチュリー・アンタルクティカのような密閉型ローバーは、全員をキャビンの中に閉じ込めることで、さらに安全性を高めている。横転の際、乗員はガタガタ揺れるかもしれないが、おそらく怪我はないだろう。 信頼性 可動エンジンの部品が少ないことから、電気探査機の性能は一般的に優れている。極地でのテストでは、ヴェンチュリーは極寒の地でも多少の調整で確実に作動することを示した(雪の堆積を処理するために特別なスプロケットを設計する必要があったが、その後はスムーズに作動した)。電気ローバーの信頼性に関する主な懸念は、バッテリー関連(極端な気温がバッテリーの寿命に影響する、または予期せぬ充電切れ)である。これらは適切な計画(予備バッテリーの携行、充電計画の策定)で対処できる。電動モーター自体は、酷使しなければ故障することはほとんどなく、最小限の問題で長時間稼働させることができる。電子的な面では、ローバーはコントローラとソフトウェアに依存しているが、それらは一般的に歩行ロボットの自律性よりも複雑ではない。そのほとんどはモーターコントローラーとトラクションコントロールで、脚式システムよりはるかに自由度が少ない。そのため 全システム障害 ローバーは転がり落ちるだけで停止する)。もうひとつの安全面は 制御性電動ローバーは、安定制御や自律ブレーキといったドライバー支援機能を装備することができる。ドライバーのミス(危険な操作を許さないなど)を防ぐための自律走行モードも搭載できる可能性がある。先進的なオフロードEVの中には、ツアーの安全を守るために遠隔監視やジオフェンシングを備えたものもある。また、大型のローバーが危険になる可能性も考慮しなければならない。 への しかし、管理された観光地では通常、スピードは低い。まとめると 電気ローバーは最高の安全性と信頼性を提供する可能性が高い 乗客に物理的な保護を提供し、操作が簡単で(ユーザーのミスを減らす)、複雑なロボットに比べて機械的な故障が少ない。また、可燃性の燃料を使用しないため、火災のリスクもない(大容量のバッテリーにも火災の懸念はあるが、それはまれで、通常は深刻な損傷や過熱に関連するもので、適切な設計によって軽減される)。主な欠点は、万が一故障した場合、ATVならトレイル外でも運べることがあるのに対し、ATVは重量があるため、他の車両で牽引する必要があることだろう。しかし、全体的な安全性の利点に比べれば、そんなことは物流上の些細な問題だ。
技術の成熟度と利用可能性
各技術の成熟度によって、観光に採用できる時期や形態が決まる。このセクションでは、それぞれの現状と予測されるスケジュールを検証する。
- カワサキ・コルレオ(と脚式乗用ロボット): コルレオのコンセプトは 未来像(2050年) パーソナル・モビリティの2025年現在、この技術は発展途上にある。川崎重工の万博でのデモは、大部分が概念的なもので、マシンが現実の世界を自由に歩く様子はなく、映像の形でしか紹介されなかった。現在 市販の乗用四脚ロボットはない.ボストン・ダイナミクスのBigDogやSpotのような研究用ロボットは、機械が歩いたり、小走りしたり、押された状態から回復したりできることを証明している。しかし、これを信頼性の高い乗用自動車にスケールアップすることは大きな飛躍である。その タイムライン 脚付き自動車の実用化は、まだまだ先になりそうだ。カワサキの2050年目標は、25年先と見ていることを示唆している。とはいえ、関心が高まれば開発は加速するだろう。複数の企業や学術チームが脚付きモビリティに取り組んでいる。例えば、現代自動車は ニュー・ホライズンズ・スタジオ は、ロボットの脚を持つ「究極のモビリティ」の開発に特化し、2021年から5年間で〜$2000万ドルを投資し、エレベート(脚のついた2人乗り自動車)のようなコンセプトの試作を行っている。このことから、2020年代後半から2030年代前半までには、次のようなものが登場するかもしれない。 試作脚式車両 人を運ぶことができる(瓦礫の中での救助やテーマパークのコンセプトライドなど、特殊な役割を担う可能性が高い)。ボストン・ダイナミクスは、より大型の貨物ロボットも示唆しているが、ライダー用のものはまだない。もう1つのデータ:軍のLS3ロボット・ラバ・プロジェクトは2010年代半ばまでにかなり進んだが、実用的な理由(騒音など)で棚上げされた。現在では、より静かな電動アクチュエーターとより優れたAIがあれば、このようなプロジェクトの復活もあり得るだろう。それでも 観光利用ロボットは極めて安全で、専門家の監視を最小限に抑え、コストを劇的に下げなければならない。例えば、サファリパークや地質保護区で、数台のハイエンド・ユニットがVIP観光客を通常では到達不可能な観光スポットまで案内するような場合だ。カワサキやヒュンダイのような企業が、コンセプトからプロトタイプ、少量生産へと突き進めば、2030年代までには実現するかもしれない。しかし、大量導入はまだ先の話だ。 空室状況 コルレオのようなものを買うことはできない。マニアが趣味で小型の脚式ロボットを買うことはできるが、このスケールに近いものはない。川崎重工のコンセプトが注目を集めれば、2020年代後半には開発計画が発表され、2030年代には実地テストが行われるかもしれない。それまでは、脚式ロボットは研究開発段階にとどまっている。まとめると、この技術は 未熟だが急速に進化している.2025年コルレオ万博は意思表示であるが、真のテストはそれを実用的な製品に変換することである。我々は少なくとも 10~15年先 脚のついたツアー用車両が現場で見られるようになるのは、おそらく数十年先のことだろう。コルレオの現状が、機能的でないショーピースであることは、今のところ、これはすぐに乗れるというよりも、SF的なものであることを強調している。
- ATV: ATVは 完全に成熟した技術 1970年代からある。世界中で広く販売されている。 今日.個人でオフロードを走りたい観光客なら、ATVを購入したりレンタルしたりするのは簡単だ。レクリエーション、農業、観光のためにATVを支える巨大産業が存在する。サスペンションの改良、よりパワフルで効率的なエンジン、パワーステアリングやオートマチック・トランスミッションのような機能の追加など、長年にわたって少しずつ改良が加えられてきたが、基本的には2025年のATVは2000年のATVとほとんど変わらない。目的は フューチャー ATVは本質的に、その解決策を提供するものである。 現状.手ごろな価格で効果があることが知られているため、近い将来も使われ続けるだろう。すでに採用されているからだ。問題は、今後採用されるかどうかだ。 段階的または補完的 より高度な技術によって。我々は次のことが期待できる。 電動ATV/UTV は、特に持続可能性を優先する観光事業において、今後10年間で着実に市場シェアを拡大していくだろう。実際、2020年代半ばの時点で、主要メーカーが電動モデルを発売している(ポラリス・レンジャーEVは最初の1台であり、現在は2023年のレンジャーXPキネティックが高性能の例である)。これは、業界が積極的に移行していることを示している。参考までに 2030多くのATVツアー・フリートは、排ガスや騒音を除去しながらも、同じ形態の乗り物を提供するため、ほとんどが電動化される可能性が高い。技術革新という点では、ATVは安全のためにより自律的な機能を取り入れるかもしれない。個々のATVが衝突回避機能や初心者ライダーのためのフォロー・ザ・リーダー機能を備えたガイド付き車列が登場するかもしれない。しかし、基本的な機動性(車輪が地面に接地する)は変わらないだろう。 空室状況 どちらかといえば、選択肢(ガス、ハイブリッド、電気)は増えるだろう。クロスオーバー車のトレンドもある。 デューンバギー、オフロードEVなどがATVと融合しつつある.しかし、これらは単にフォームファクターのバリエーションに過ぎない。重要なのは、ATV(およびそのサイド・バイ・サイド)は、最も実用的な自家用オフロード交通手段として、今後10年間はここにとどまるということだ。ATVがベースラインとなり、新しい技術がそれに取って代わるためには、ATVがそれを上回る必要がある。脚式ロボットや先進的なローバーが実用化されれば、ATVはよりニッチになるか、環境規制のために特定の地域で制限されるかもしれないが、それは推測にすぎない。しかし、それは推測に過ぎない、 ATVはすぐに利用できるソリューション - 近い将来、オフロード観光の進歩は、そのまま、あるいは電動化された形で、オフロードに関わることになるだろう。
- 電動ローバー オフロードの電気ローバーや電気自動車は ますます利用しやすくなっている.脚を持つロボットとは異なり、オフロード車の電動バージョンはすでに購入したり作ったりすることができる。前述したように、ポラリスやその他のメーカーは現在、電動サイド・バイ・サイドを提供しているし、小規模な企業もオフロード用の電動クワッドバイクや電動ダートバイクを製造している。これと並行して、極地用の特殊な電気自動車(極地用のベンチュリー・アンタークティカや、実験的な太陽電池駆動の砂漠用バギーなど)も存在する。バッテリーを搭載した電気ドライブトレインという技術は、(電気自動車革命のおかげで)一般的にはかなり成熟している。比較的新しいのは、それを全地形型アプリケーションに大規模に適用することだ。その 採用スケジュール 毎年、より多くのオフロードEVが市場に投入されている。2020年代後半までには、あらゆるカテゴリー(スポーツATVから大型探査トラックまで)で、電気またはハイブリッド・パワーを搭載した強力な製品が登場するはずだ。電気モーターはゼロ回転で高トルクを発揮するため、匍匐前進や登坂に適している。2030年までには、エコツーリズム事業者が電気ローバーのみを使用するのが一般的になっているかもしれない。例えば、サファリ会社の中には、静かなゲーム観戦のためにランドローバーをすでに電気ローバーに改造しているところもある。例えば 技術的成熟電気ローバーは、何百万台もの電気自動車で使用されている実績のあるコンポーネント(モーター、バッテリー、制御システム)を活用しているため、信頼性とサポートインフラは急速に向上している。遠隔地の充電ステーションは依然として課題だが、ポータブルソーラー、バッテリー交換システム、ハイブリッドレンジエクステンダー(発電機)などのソリューションがギャップを埋めることができる。また 自律走行ローバー技術 一部の公園では、道路上での自律走行シャトルの実験が行われている。道路外での自律走行は難しいが、車列走行のための部分的な自律走行はすぐに実現するだろう。 空室状況 電動UTVは購入可能だが、まだ市場規模は小さい。オフロード走行が可能な高性能電動トラック(Rivian R1Tのような)も販売されており、場合によっては観光用に再利用されるかもしれない。以下のようなニッチ企業もある。 スインカー フランスでは、独立した傾斜車輪を持つ電動オフロードバギーがあり、すでに楽しいレクリエーション車として販売されている。トレンドはここにある。要するに、 電気ローバーは次の論理的ステップ 従来のATVとは異なり、脚式ロボットとは異なり、動力源の交換とデザインの微調整だけで、乗り物の移動方法に革命を起こす必要はない。それは SFではない市場に出回り、その存在感は増すばかりだ。普及までの予測スケジュールは以下の通りである。 数十年ではなく数年このような状況下で、われわれは、このような経済状況下での大きな成長を期待することができる。 2025-2035 特に持続可能性がセールスポイントとなる場合はそうだ。これとは対照的に、脚のついた乗り物が登場するのは、実験的な形でその時期が終わる頃かもしれない。電動ローバーは、事実上 近未来 今日のATVと明日のSFウォーカーのギャップを埋める、プライベート・オフロード輸送のためのソリューション。
それぞれのソリューションには、明確な役割とタイムラインがある。その中で 近い将来電動ローバーや電動四輪バギーは、実証済みの機動性と持続可能性を兼ね備えているため、厳しい地形での自家用交通手段の主流となる準備が整っている。ツアーの運営方法を根本的に変えることなく、より静かで環境に優しい冒険を提供するために、電動UTV/ATVに切り替えるツアーオペレーターが増えるだろう。 四輪バギー 特に、電動モデルがよりクリーンになっていくにつれて。 電動ローバー will expand access by providing safer, group-friendly vehicles for なんちs (imagine silent electric 4x4 shuttles taking へのurists up a mountain trail or through a wildlife reserve with minimal disturbance).
さらにその先には 長期(15年以上)技術的なハードルが克服されれば、次のような脚付き車両が登場するだろう。 コルレオ 可能性がある open entirely new frontiers for travel. They promise an experience akin への riding a sure-footed animal, reaching places even the best 4x4 might not, like a narrow cliffside path or across a boulder field, all while being clean and smart. The novelty and excitement of such a ride would itself be a へのurist draw (picture “robot trekking” adventures in rugged landscapes). However, reaching that point will require significant advances in robotics and cost reduction. It’s plausible that initial deployments of rideable legged robots will be in specialized expeditions or as premium attractions – for instance, a guided へのur where a small group rides robotic mounts への a hard-への-reach vista, supervised by technicians. By 2050, as Kawasaki envisions, if these machines have proven reliable and economies of scale kick in, they might join 四輪バギー as a regular option for off-road travel, especially as our societies place even greater emphasis on ゼロ-emission and low-impact exploration.
結論として 当面、電気自動車と従来の車輪付き自動車が現実的な選択肢であることに変わりはない。 ATVと電動ローバーは、極限地での個人的な観光輸送のために、能力、コスト、安全性のバランスをとりながら使用されることになるだろう。ATVは独立した自由と敏捷性を提供し、大型の電動ローバーは包括的な快適性と持続可能性を提供する。 川崎のコルレオ と似たような脚のコンセプトは、すぐに取って代わるものではないが、モビリティが進む可能性のあるエキサイティングな方向に光を当てている。人間とインテリジェントな機械が風景と調和しながら移動するトレイル・アドベンチャーのビジョンを鼓舞する。 "動く衝動" 大自然の中で解き放たれる車輪、トラック、脚、それぞれのテクノロジーは、アドベンチャー・ツーリズムの多様な世界の中でニッチを見つけるかもしれない。