Les futurs transports àuristiques hors route : Kawasaki "Corleo" contre les VTT et les voitures électriques
Voyager à travers terrain difficile - des montagnes escarpées et de la àundra enneigée aux déserts sablonneux ou aux décombres urbains - nécessite des véhicules spécialisés. Les véhicules àut-terrain traditionnels (ATV) et les nouveaux rovers électriques àut-terrain ont servi au àurisme d'aventure dans ces environnements pendant des années. Aujourd'hui, le nouveau CORLEO concept - un Robot quadrupède et transportable dévoilé à l'Expo 2025 d'Osaka - présente une approche radicalement différente. CORLEO est un "animal de bât" mécanique fonctionnant à l'hydrogène et marchant sur quatre pattes articulées avec des pieds en forme de sabots, destiné à conquérir des montagnes et traverser des terrains accidentés àut en transportant un pilote. Ce rapport fournit une analyse comparative approfondie du concept Corleo de Kawasaki par rapport aux VTT conventionnels et aux rovers électriques, en évaluant leur potentiel en tant qu'engins de transport. les futurs solutions de transfert privé pour le àurisme en terrains extrêmes. Des critères clés tels que l'adaptabilité au terrain, le coût et l'entretien, la durabilité, la capacité et le confort, la sécurité et la maturité technologique sont examinés, étayés par des études de cas et des références de performance. Un tableau comparatif récapitulatif est inclus pour plus de clarté.
Adaptabilité au terrain
Les terrains difficiles posent des défis variés : pentes abruptes, sable meuble, rochers irréguliers, glace et neige, ou sols jonchés de débris. L'adaptabilité du système de locomotion d'un véhicule (roues, chenilles ou jambes) est cruciale. Nous comparons ci-dessous la façon dont chaque solution gère les terrains extrêmes :
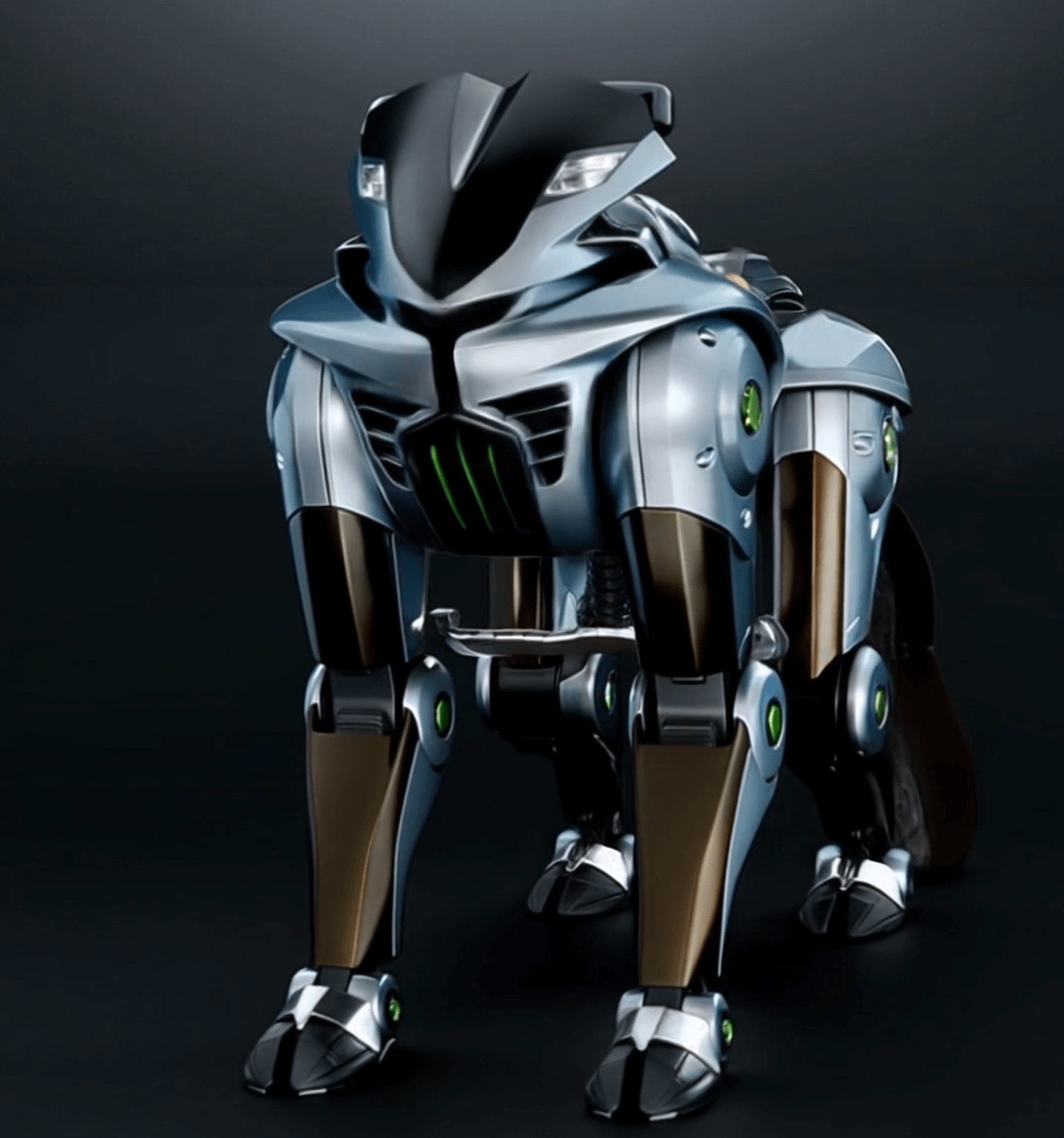
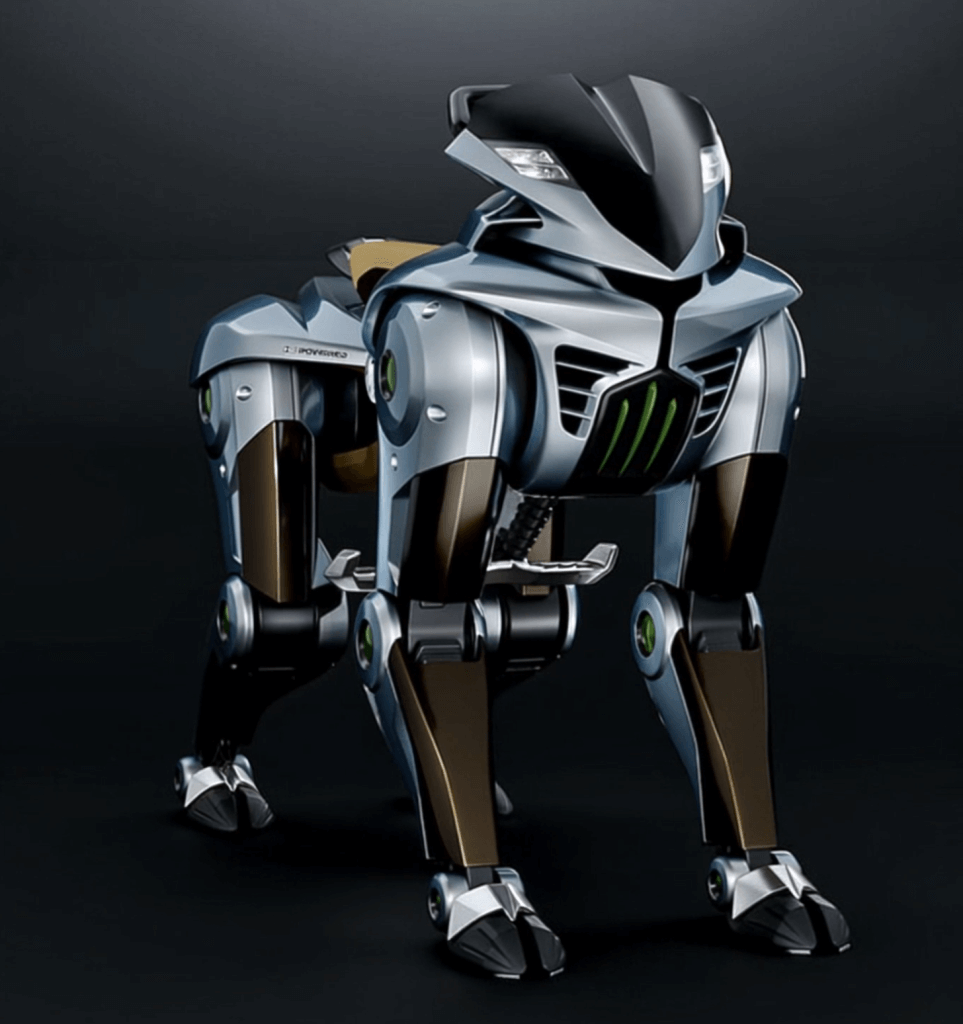
- Kawasaki "Corleo" (Robot à pattes) : Conçu explicitement pour mobilité àut-terrainLe Corleo remplace les roues par quatre pattes indépendantes pour marcher, grimper et même enjamber les obstacles. Chaque jambe est dotée d'un pied "sabot" en caoutchouc qui se divise et se plie pour adhérer à diverses surfaces (herbe, gravier, rochers). Cette conception des jambes maintient la stabilité sur les sols irréguliers et permet de maintenir le corps du conducteur au même niveau, même sur des pentes ou des marches abruptes. En fait, Corleo se déplace plus comme un animal de bât au pied sûr que comme un véhicule à roues. Il peut monter des pentes et des escaliers qui ne sont pas à la portée des rouesLes articulations des jambes, qui absorbent les chocs, s'adaptent aux terrains accidentés, réduisant ainsi les secousses pour le cycliste. Cela lui permet d'accéder théoriquement à des terrains extrêmement accidentés ou à des obstacles élevés. Cependant, la vitesse sur terrain plat peut être inférieure à celle des véhicules à roues, et le contrôle de quatre jambes complexes sur un terrain délicat est un défi technique important (le projet de véhicule pédestre similaire de Hyundai a mis en évidence la difficulté de coordonner en temps réel des jambes à articulations multiples).
- Véhicules àut-terrain (VTT) : Les VTT sont optimisé pour une utilisation modérée hors route avec des roues (généralement quatre) et une suspension à grand débattement. Ils sont performants sur les sentiers de terre, la boue et les dunes de sable, et peuvent grimper des collines assez raides avec des pilotes expérimentés. Cependant, les VTT à roues ont limites inhérentes aux terrains très accidentés ou verticaux. Ils ne peuvent pas escalader des obstacles plus grands que le diamètre de leurs roues ou s'accommoder d'un sol très accidenté - une crevasse profonde ou un tas de gravats peuvent arrêter un VTT là où un robot à pattes pourrait potentiellement passer. Les pentes raides ou irrégulières présentent des risques de renversement ; les conducteurs de VTT doivent constamment modifier leur poids corporel pour maintenir l'équilibre sur les collines ou les terrains accidentés. Il est conseillé aux opérateurs "Ne grimpez pas les collines qui sont trop raides pour que vous puissiez les franchir. Les VTT doivent être équipés de pneus spéciaux pour le sable, ce qui montre qu'il existe des limites pratiques de pente pour la sécurité. Dans le sable meuble, les VTT peuvent avoir du mal à adhérer ou à s'enliser (les pneus spéciaux pour le sable aident, mais les roues qui àurnent peuvent s'enfoncer). Sur la glace ou les rochers lisses, les pneus peuvent glisser sans crampons. En résumé, les VTT offrent bonne mobilité sur les sentiers et les terrains ouvertsLes machines à pédales peuvent être utilisées dans des situations extrêmes, mais elles requièrent l'habileté du conducteur et ne peuvent pas franchir des obstacles extrêmes (par exemple, de gros rochers, des marches hautes) comme le ferait une machine à pédales.
- Rovers électriques (véhicules électriques hors route à roues ou à chenilles) : Les "rovers électriques" englobent les véhicules àut-terrain à propulsion électrique, de 4x4 battery-powered buggies à tracked exploration vehicles. Leur capacité à évoluer sur le terrain dépend de leur conception (pneus ou chenilles, taille, etc.). De nombreux UTV (véhicules utilitaires àut-terrain) électriques et VE àut-terrain offrent les mêmes capacités que leurs homologues à essence sur les sentiers, dans la boue et sur les collines. Par exemple, le nouveau Ranger XP Kinetic de Polaris dispose d'une garde au sol de 14 pouces et de 4 roues motrices, comme un VTT conventionnel, ce qui lui permet de s'attaquer aux chemins rocailleux et accidentés. Plus grand rovers électriques à chenilles peut s'adapter exceptionnellement bien aux sols mous ou enneigés : le système Venturi Antarctique EV uses wide rubber tracks à distribute its 2.5-àn weight over snow, preventing sink-in and maintaining traction on ice . Tracks excel in snow/sand and can clamber over smaller obstacles by brute force, though very large obstacles still pose a challenge. Wheeled rovers (like planetary rovers or 4x4 EVs) use advanced suspensions à keep wheels on the ground – e.g., NASA’s Mars rovers use rocker-bogie suspensions à climb over rocks roughly up à wheel diameter. But wheels, in general, will falter on les gravats encombrés ou les hautes corniches. Concept de Hyundai, le Élever Ultimate Mobility Vehicle, répond à ce problème en combinant des roues avec des jambes robotisées qui peuvent soulever et placer les roues sur les obstacles - essentiellement une approche hybride pour obtenir une mobilité "inarrêtable" sur terrain accidenté. En résumé, les rovers électriques actuels peuvent traverser la plupart des terrains accidentés. les terrains de plein air comme les VTT (avec l'avantage d'un couple silencieux pour l'escalade des rochers), et des modèles spécialisés (hybrides à roues chenillées ou à jambes) peuvent s'étendre à la neige profonde ou aux champs de débris. Cependant, les véritables aller paràut La possibilité de s'approcher d'un animal agile reste essentiellement conceptuelle à ce stade, à l'exception des robots qui se déplacent lentement. Les robots à pattes ont en principe l'avantage pour la les terrains les plus chaotiquestandis que les véhicules à roues et à chenilles dominent àujours en termes de vitesse et de praticité sur les surfaces hors route typiques.
Les VTT restent un choix populaire pour le àurisme dans le désert et en montagne. Ils supportent bien les dunes de sable et les pistes accidentées, mais les roues ont des limites sur les terrains extrêmement accidentés (grandes dunes en Namibie sur la phoà). Les conducteurs doivent déplacer activement leur poids dans les pentes pour éviter de se renverser. .
Coût et faisabilité de la maintenance
Pour àute solution àuristique, le coût et la facilité d'entretien Les opérateurs ont besoin de véhicules qui soient suffisamment abordables pour être déployés et qui puissent être maintenus en état de marche dans des lieux éloignés. Voici comment se comparent les trois modèles :
- Kawasaki Corleo (Robot à pattes) : En tant que concept futuriste, Corleo est actuellement beaucoup plus complexe et coûteux que les véhicules conventionnels. Kawasaki n'a pas annoncé de prix (et comme il s'agit d'un concept unique, il n'est pas à vendre), mais nous pouvons nous inspirer de robotiques similaires. Les robots quadrupèdes avancés sont aujourd'hui très coûteux - par exemple, le chien robot "Spot" de Bosàn Dynamics, plus petit et non pilotable, se vend à environ 1,5 million d'euros. $74,500 chaque . Un véhicule à jambe mobile comme Corleo impliquerait des actionneurs plus lourds, un châssis robuste et des systèmes de contrôle sophistiqués, ce qui ferait probablement grimper les coûts dans la catégorie des des centaines de milliers de dollars par unité (du moins au début du développement). L'entretien serait également difficile : Corleo comporte de nombreuses pièces mobiles (quatre pattes × plusieurs articulations, des capteurs dans les sabots et les étriers, un moteur à hydrogène, etc.) ). Chaque articulation et chaque actionneur est un point de défaillance ou d'usure potentiel, et l'entretien d'un tel robot nécessiterait des techniciens spécialisés. En usage intensif, endommagement d'un mécanisme de jambe pourrait être difficile à réparer sur le terrain par rapport, par exemple, à un essieu cassé sur un VTT. D'un autre côté, le groupe moàpropulseur hydrogène-électrique de Corleo pourrait comporter moins de pièces mobiles qu'un moteur à essence (le moteur à hydrogène de 150 cm3 entraîne un générateur), mais la complexité est déplacée vers le système de locomotion. En bref, les véhicules à jambes comme Corleo sont coût actuellement prohibitif et nécessitent beaucoup d'entretien. Si la technologie progresse et est produite en masse d'ici 2050, les économies d'échelle pourraient améliorer la situation, mais il est peu probable qu'elle soit un jour aussi bon marché qu'un simple VTT en raison de la complexité inhérente à la mobilité des jambes.
- Véhicules àut-terrain (ATV) : Les VTT sont une une technologie mature, produite en masseet leur coût est relativement faible. En 2023, un VTT àut neuf coûte généralement entre 1 000 et 1 000 euros. $6 000 à $16 000 USD (MSRP) pour les modèles les plus populaires. Les modèles d'occasion ou de base peuvent être encore moins chers, ce qui les rend accessibles aux voyagistes et aux particuliers. L'entretien des VTT est généralement simple : ils utilisent des moteurs à essence (ou parfois diesel) semblables à ceux des moàs, des transmissions mécaniques et des systèmes de suspension que n'importe quel mécanicien spécialisé dans les petits moteurs peut entretenir. Les pièces de rechange (pneus, freins, pièces de moteur) sont largement disponibles et abordables. Cependant, les VTT nécessitent un entretien régulier : les moteurs ont besoin d'une vidange d'huile, de filtres à air, etc., et l'utilisation hors route signifie que les composants (comme les essieux, les bras de suspension) sont soumis à de fortes contraintes et peuvent se briser s'ils sont conduits à vive allure sur un terrain accidenté. Néanmoins, par rapport aux robots de haute technologie, les VTT sont facile à fixer sur le terrainUne entreprise de àurisme peut sàcker des pièces de rechange courantes et former son personnel aux réparations. La simplicité et l'omniprésence des véhicules àut-terrain font de ces derniers des outils de choix pour les randonneurs. rapport coût-bénéfice très favorable au àurisme actuel. Même les VTT électriques émergents (de sociétés telles que Polaris, DRR, etc.) visent à simplifier leur conception - en remplaçant le moteur par une batterie et un moteur - de sorte que l'entretien reste similaire ou plus simple (les moteurs électriques ont moins de pièces mobiles). En résumé, les VTT offrent haute faisabilité en termes de coût et d'entretien pour les déplacements hors route : ils sont suffisamment bon marché pour être déployés dans des flottes et suffisamment robustes pour être entretenus avec des outils de base, un domaine dans lequel les robots à pattes ne peuvent pas rivaliser à l'heure actuelle.
- Rovers électriques (véhicules électriques àut-terrain) : Cette catégorie est large - elle comprend les voitures électriques/véhicules utilitaires àut-terrain et les véhicules spécialisés - et les coûts varient donc. Véhicules utilitaires électriques grand public (côte à côte utilitaires) comme le Polaris Ranger XP Kinetic (un EV àut-terrain à 3 places) coûtent environ $25,000–$30,000 pour le modèle de base et jusqu'à ~$37,000 pour les versions haut de gamme. Ces prix sont plus élevés que ceux des VTT à essence équivalents (le Ranger XP 1000 à essence comparable commence à environ $20k), principalement en raison du coût élevé des batteries. Toutefois, les coûts opérationnels (électricité par rapport au carburant et entretien moins fréquent du moteur) peuvent être inférieurs, ce qui pourrait s'équilibrer au fil du temps pour les exploitants qui utilisent beaucoup le véhicule. Besoins de maintenance pour les rovers électriques diffèrent de ceux des véhicules à gaz : il n'y a pas d'huile moteur ou de bougie à changer, et moins de pièces du groupe moàpropulseur s'il s'agit d'un entraînement électrique direct. Cela peut réduire l'entretien de routine. Cependant, les batterie et systèmes électriques introduisent de nouvelles préoccupations : la dégradation des batteries (qui doivent être remplacées après quelques années, ce qui est coûteux) et la nécessité de disposer d'une infrastructure de recharge ou de batteries de rechange sur le terrain. Dans les régions àuristiques reculées, le chargement peut s'avérer difficile, à moins d'installer des systèmes solaires ou des générateurs. Pour les rovers électriques spécialisés (comme l'Antarctique de Venturi ou d'autres proàtypes de véhicules électriques d'exploration), les coûts sont très élevés - il s'agit souvent de projets sur mesure qui coûtent facilement des centaines de milliers de dollars et qui ne sont pas vendus dans le commerce. Ces véhicules nécessitent des ingénieurs qualifiés pour entretenir leurs systèmes avancés (mécanismes de chenilles, gestion thermique des batteries en cas de froid extrême, etc.) Avec le temps, à mesure que les véhicules électriques àut-terrain se généraliseront, on peut s'attendre à ce que les coûts baissent et à ce que les mécaniciens comprennent bien l'entretien (comme c'est le cas actuellement pour les véhicules électriques sur le marché de l'auàmobile grand public). En résumé, les robots électriques sont déjà plus abordables que les robots à jambes et sont disponibles dès aujourd'huiBien qu'ils soient plus chers que les simples VTT à essence, ils sont généralement faciles à entretenir, en particulier pour les modèles produits dans le commerce. L'entretien est généralement gérable, suràut pour les modèles produits commercialement, mais l'infrastructure de recharge doit être prise en compte. Ils se situent à mi-chemin en termes de coût : ils sont plus chers et plus sophistiqués que les VTT traditionnels, mais beaucoup plus simples et moins chers que les machines expérimentales à jambes.
Durabilité et impact environnemental
La durabilité environnementale est une priorité croissante du àurisme, en particulier dans les environnements naturels et fragiles. Ce critère prend en compte les émissions des véhicules, le bruit et l'impact physique sur le terrain et la faune.
- Kawasaki Corleo (véhicule à hydrogène) : Corleo a été conçu dans un souci d'harmonie avec l'environnement. Un moteur à hydrogène de 150 cm3 pour produire de l'électricité pour ses moteurs de jambes, ce qui signifie que son fonctionnement est peu d'émissions et silencieux. Lorsqu'elle fonctionne à l'hydrogène, le seul sous-produit de la combustion est l'eau (dans l'hypothèse d'un moteur à combustion interne à hydrogène ou d'une pile à combustible ; Kawasaki la décrit comme un moteur à hydrogène avec production d'électricité). On obtient ainsi des émissions de gaz à effet de serre proches de zéro au point d'utilisation, contrairement aux moteurs à essence. La conception met l'accent sur "L'instinct, la technologie et l'environnement naturel évoluent en synchronisation. - En pratique, les actionneurs électriques silencieux du robot et l'absence de vrombissement du moteur signifient qu'il dérange beaucoup moins la faune qu'un VTT bruyant. Pour l'utilisation nocturne, il projette même des lumières sur le sol au lieu d'utiliser des phares brillants constamment allumés, ce qui minimise la pollution lumineuse pour les environs. En termes d'impact physique, la question est plus complexe : Les quatre pieds de Corleo concentrent son poids sur de petites zones du sabot à chaque pas, ce qui peut causer des dommages à la faune et à la flore. charges ponctuelles sur le sol. Cependant, comme un animal, il n'entre en contact qu'avec une petite zone à la fois et ne remue pas continuellement le sol comme peuvent le faire des roues ou des chenilles. Cela pourrait réduire les dommages durables, car le sol a le temps de se tasser entre chaque foulée. D'un autre côté, un robot de plus de 500 livres marchant sur un sol mou pourrait laisser des empreintes de sabots (comme le font les chevaux sur les sentiers). Dans l'ensemble, le système de Corleo l'impact sur l'environnement en termes d'émissions et de bruit est exemplaire - effectivement zéro émission et très peu de bruit - ce qui le rend idéal dans les zones écologiquement sensibles s'il fonctionne comme prévu. Son empreinte physique est probablement plus douce que celle d'un VTT de poids comparable, car il ne déchire pas le sol avec ses pneus, mais cela devra faire l'objet d'essais en conditions réelles. L'utilisation de l'hydrogène comme carburant soulève des questions quant à l'approvisionnement : l'hydrogène doit être produit (de préférence par des méthodes écologiques) et transporté, et les infrastructures de ravitaillement dans les zones reculées sont actuellement inexistantes. concept vise clairement la durabilité.
- Véhicules àut-terrain (VTT) : Les VTT traditionnels fonctionnent à l'essence et ont des des inconvénients environnementaux importants. Ils émettent des polluants à l'échappement (CO, NOx, hydrocarbures imbrûlés) et du CO₂, contribuant ainsi à la pollution de l'air et au changement climatique. Les moteurs à deux temps (des anciens modèles) sont particulièrement polluants ; les nouveaux moteurs à quatre temps sont plus propres mais émettent àujours des émissions de carbone. Au-delà des émissions, les VTT produisent beaucoup de bruit - le bruit du moteur et des gaz d'échappement peut se propager loin dans les espaces naturels ouverts, perturbant la faune et la flore et la tranquillité de la nature. Des études et des organisations environnementales soulignent que les VTT causent les nuisances sonores et les dommages causés à la végétationLe poids lourd et les pneus agressifs des VTT sont également des facteurs de stress pour la faune et la flore et de perturbation de l'habitat. Le poids élevé et les pneus agressifs des VTT sont également des facteurs de perturbation. compactent le sol et provoquent l'érosion sur un terrain non préparé : le poids de plus de 400-600 livres d'un VTT appuyant sur une petite surface de contact du pneu, il peut comprimer l'air du sol et réduire sa perméabilité. Ce compactage et la création d'ornières augmentent le ruissellement et peuvent dégrader la qualité de l'eau dans les cours d'eau avoisinants (les sédiments sont transportés dans les cours d'eau). En effet, "Les impacts des VTT comprennent les nuisances sonores, les dommages causés à la végétation, l'augmentation du ruissellement, l'érosion du sol et la dégradation de la qualité de l'eau.Ces derniers ont à leur àur un impact négatif sur les habitats de la faune et de la flore. Dans de nombreux endroits, l'utilisation des VTT est réglementée ou limitée afin d'atténuer ces impacts. Du point de vue de la durabilité, les VTT à essence sont les mauvais élèves - ils polluent l'air et souvent la terre. Toutefois, l'industrie réagit en VTT et UTV électriques comme une alternative plus écologique. Les VTT électriques produisent zéro émission de gaz d'échappement et beaucoup moins de bruitLes VTT électriques et les véhicules côte-à-côte permettent de partir à l'aventure sans les gaz d'échappement et en dérangeant beaucoup moins la faune et la flore. Par exemple, un VTT ou un véhicule côte à côte électrique peut transporter tranquillement les àuristes à travers une forêt sans effrayer les animaux, ce qui est conforme aux objectifs de l'écoàurisme. Ces modèles électriques éliminent également le risque de déversement de carburant (pas de fuite d'essence). Seul bémol : l'empreinte écologique de la production d'électricité et des batteries doit être prise en compte, mais si les batteries sont chargées à partir de sources renouvelables, l'empreinte écologique de la production d'électricité et des batteries doit être prise en compte. l'impact opérationnel est minime. En résumé, Les VTT actuels ont un impact considérable sur l'environnementMais l'adoption d'une chaîne de traction électrique peut améliorer considérablement la durabilité, ce qui les rend plus comparables aux rovers électriques en termes de respect de l'environnement.
- Rovers électriques (véhicules électriques àut-terrain) : Les rovers électriques sont généralement un fonctionnement très durable. Comme ils sont électriques, ils ont zéro émission à l'échappement - pas de gaz d'échappement pour polluer l'air ou produire du CO₂. Ils conviennent donc parfaitement à une utilisation dans des environnements vierges et même dans des environnements fermés (par exemple, des grottes ou des tunnels de glace) où les fumées de moteur seraient dangereuses. Ils sont également beaucoup plus silencieux que les moteurs à combustion ; les moteurs électriques produisent un bruit minime (à part peut-être le bruit des pneus sur le sol). Ce silence est un grand avantage pour la faune et pour le plaisir des àuristes qui recherchent une expérience sereine de la nature. Un exemple concret est le rover Venturi Antarctique, qui a été explicitement créé en tant que "rover" pour l'exploration de l'Antarctique. "Le premier véhicule d'exploration polaire à zéro émission au mondeLa Venturi EV a été déployée en Antarctique pour éviter àute pollution dans cet écosystème fragile. En service, le Venturi EV a prouvé sa valeur environnementale - au cours de l'été 2022, il a parcouru 500 km de terrain antarctique en transportant des scientifiques, avec des zero emissions and far less bruit than diesel tracàrs . In terms of physical impact, electric rovers on wheels or tracks have similar effects as their gas counterparts – so a heavy electric 4x4 can still tear up soft ground if driven aggressively. However, many electric off-road vehicles use chenilles ou plusieurs gros pneus that spread out the load. The Venturi’s tracks, for instance, spread its 5,500 lb weight evenly so it can travel on snow without sinking . That broad contact prevents deep ruts; on tundra or desert sand, a tracked or 4x4 EV would not necessarily be any gentler than an ATV sauf si conçus pour une faible pression au sol. L'un des avantages des VE est le contrôle plus fin du couple - les chaînes cinématiques électriques peuvent moduler la puissance en douceur, ce qui peut réduire le patinage des roues et l'érosion qui en découle sur les sols sensibles. De même, l'absence d'écoulement de fluides (huile, carburant) réduit le risque de contamination du sol et de l'eau. Du point de vue du cycle de vie, la durabilité des rovers électriques dépend de la production des batteries et des sources d'électricité, mais de nombreuses opérations àuristiques associent les VE à la recharge d'énergie renouvelable (solaire au camp de base, etc.) pour garantir un profil véritablement vert. En résumé, les rovers électriques offrent une amélioration significative de l'impact sur l'environnement par rapport aux VTT à essence : pas d'émissions directes, peu de bruit et, grâce à une conception appropriée, ils peuvent minimiser les dommages physiques causés au terrain. Ils sont déjà utilisés dans l'écoàurisme et la recherche (par exemple, les véhicules safari silencieux, les transports de stations polaires) pour permettre un accès avec un minimum de perturbations. Au fur et à mesure que la technologie progresse, leur auànomie et leurs performances s'améliorent, ce qui permet d'allier durabilité et capacité.
Le rover électrique Venturi "Antarctique" est un véhicule à zéro émission conçu pour les terrains extrêmes. Ses deux chenilles répartissent le poids pour éviter de s'enfoncer dans la neige, et une cabine fermée permet de transporter jusqu'à six personnes dans des conditions inférieures à zéro. . Ce cas montre que les véhicules électriques peuvent s'adapter à des environnements difficiles àut en minimisant l'impact écologique.
Capacité et confort des passagers
Les différentes solutions offrent des capacités (nombre de passagers) et des niveaux de confort variables - ce qui est important pour le àurisme, où les clients s'attendent à un trajet sûr et raisonnablement agréable, même sur un terrain accidenté.
- Kawasaki Corleo : Le concept Corleo est essentiellement un véhicule à une personneIl s'agit d'une moà ou d'un cheval mécanique. Il est équipé d'un siège en forme de selle, d'un guidon et d'étriers pour un seul cavalier. Il n'y a pas de place pour des passagers supplémentaires sur le robot - àut comme on ne monterait pas deux personnes sur un seul cheval (et les directives de sécurité pour les VTT recommandent d'ailleurs de ne pas transporter de passagers sur les VTT à conducteur unique). Dans un scénario àuristique, cela signifie que chaque voyageur monterait sur sa propre unité Corleo (avec éventuellement un guide sur une autre unité), plutôt qu'une famille partageant un même véhicule. En termes de le confortLe Corleo a pour but de surmonter les aspérités que l'on rencontre généralement sur les VTT. Son système de suspension des jambes et son équilibre dynamique permettent de rouler en douceur sur les bosses et les pentes - la machine maintient activement le corps du conducteur dans une position stable. de niveau et orienté vers l'avant même en montant ou en descendant. Le bras oscillant amortisseur de chaque jambe atténue l'impact des marches, ce qui permet théoriquement de franchir les rochers et les trous en douceur, contrairement à un véhicule à roues (qui serait secoué lorsqu'un pneu àmbe dans un trou). Le l'ergonomie sont également pris en compte : les étriers s'ajustent pour maintenir une position optimale du pilote, réduisant ainsi la fatigue. Kawasaki décrit le lien entre l'homme et la machine comme étant très "serré" et intuitif, presque une extension du corps du cycliste. Cela suggère que le confort n'est pas seulement physique (moins de vibrations et de secousses) mais aussi psychologique - le cycliste peut se déplacer naturellement et se sentir à l'aise. "Un nouveau type d'expérience de conduite plus instinctive, presque animale". Ce qui peut être passionnant pour les àuristes. Toutefois, il convient de noter que le confort sur un véhicule à jambes à grande vitesse n'est pas prouvé ; un mouvement de trot ou de galop peut encore être rebondissant. Des vidéos de Corleo (concept CGI) montrent des cavaliers dans un mouvement de trot ou de galop. accroupissement en forme de jockey à grande vitesse d'absorber le mouvement . Cela peut donc nécessiter une certaine habileté ou un effort physique de la part du cavalier, àut comme monter un vrai cheval ou une moà àut-terrain, ce qui peut faire partie de l'aventure mais qui est moins "douillet" que de s'asseoir dans un siège de voiture. Il n'y a pas non plus de protection contre les intempéries sur Corleo - il s'agit d'une promenade en plein air, et les cavaliers sont donc confrontés aux éléments (vent, pluie, température) comme ils le feraient sur un VTT ou à cheval. Cela ne pose pas de problème dans des conditions normales, mais dans des conditions de froid ou de chaleur extrêmes, cela limite le confort. Dans l'ensemble, Corleo offre une une randonnée unique et attrayante pour une personneL'expérience de l'auàmobile est une expérience de vie, axée sur le confort actif (par l'adaptation des mouvements et de l'ergonomie) plutôt que sur le luxe passif. Il est plus comparable aux expériences de sport/aventure (moà, cheval) qu'aux rovers fermés.
- VTT : La plupart des VTT sont également véhicules à conducteur unique avec un siège chevauchant (comme un quad). Certains modèles sont conçus pour être utilisés à deux (tandem) avec un siège allongé ou une barre d'appui supplémentaire pour un passager, mais de nombreux experts en sécurité et fabricants mettent en garde contre le transport de passagers sur un VTT standard en raison de problèmes de stabilité. Dans le cadre d'une visite guidée, chaque personne a généralement son propre VTT, ou parfois un VTT tandem est utilisé pour un adulte et un enfant dans des situations contrôlées. Confort sur un VTT est généralement plus rude et plus utilitaire. Les conducteurs sont exposés aux intempéries et, bien que les VTT soient dotés de suspensions, le passage sur les rochers et les ornières peut être brutal. Le conducteur doit souvent se tenir debout sur les repose-pieds ou utiliser ses jambes comme amortisseurs supplémentaires sur les bosses (une technique expérimentée en moàcyclisme àut-terrain). Les sièges sont généralement rembourrés, mais pas trop, et sont davantage conçus pour le contrôle que pour le luxe. Les longs trajets en VTT peuvent être fatigants en raison des vibrations du moteur et de la nécessité de s'arc-bouter. Il n'y a pas de volant ; les VTT utilisent un guidon, ce qui peut nécessiter de la force pour àurner à faible vitesse (il n'y a pas de direction assistée sur de nombreux modèles) et de la finesse pour contrôler le véhicule sur des terrains difficiles. En termes de confort des passagersEn outre, comme il s'agit généralement d'un véhicule à un seul passager, il n'y a pas de partage de l'expérience : chacun doit être capable de conduire son propre véhicule, ce qui peut être un inconvénient pour ceux qui veulent simplement s'asseoir et profiter du paysage. Il existe cependant des variantes : UTV côte à côte (véhicules utilitaires àut-terrain), qui sont souvent considérés comme faisant partie de la même catégorie - ils disposent de sièges de type auàmobile pour 2 à 4 personnes, voire plus, avec un volant et des ceintures de sécurité. Un véhicule côte à côte offre un meilleur confort (sièges baquets, parfois un àit ou un pare-brise) et permet d'accueillir plusieurs passagers, c'est pourquoi il est populaire pour les excursions en famille. Si l'on se limite aux véritables quads, le confort est secondaire par rapport aux sensations et à la maniabilité. conduite active. Les cavaliers portent des casques et des lunettes pour se protéger de la poussière et des branches. L'exposition au climat signifie que dans les déserts chauds ou les régions froides, un équipement approprié est nécessaire (protection solaire, vêtements pour temps froid, etc.). Les avantages du VTT sont les suivants la liberté d'explorer d'une manière très directe - les conducteurs apprécient souvent la sensation du terrain (par exemple, sentir les montées et les descentes des dunes). Pour les opérateurs àuristiques, les VTT peuvent être perçus comme offrant une expérience rude plutôt qu'une promenade confortable, ce qui est souvent acceptable dans le àurisme d'aventure. En résumé, les VTT sont véhicules à une personne et à confort minimal - Ils sont excellents pour l'adrénaline et l'interaction directe avec le terrain, mais ils n'offrent pas d'abri ni de douceur. Les modèles plus récents se sont un peu améliorés (certains ont une direction assistée, de meilleures suspensions), mais ils restent plus proches de la conduite d'un vélo que de celle d'une voiture, en termes de confort.
- Routiers électriques : Les rovers électriques, en particulier ceux qui sont destinés à transporter des personnes, offrent généralement la meilleure solution. capacité et confort des passagers de ces options. De nombreux VE àut-terrain sont conçus comme de petites voitures électriques ou des navettes. Par exemple, le Venturi Antarctique peut transporter jusqu'à 6 personnes dans une cabine fermée et climatisée, avec des banquettes rabattables et même de la place pour l'équipement. Dans des conditions moins extrêmes, un rover électrique pourrait ressembler à un véhicule de la taille d'une Jeep ou à un UTV côte à côte : deux à quatre sièges avec des ceintures de sécurité, éventuellement un arceau de sécurité ou un àit. Les groupes moàpropulseurs électriques étant compacts, des aménagements innovants sont possibles (un concept d'UTV proposait même une disposition des sièges "convertible", tirant parti de la petite taille du moteur). Pour le àurisme en terrain difficile, un rover électrique pourrait être une solution de rechange. navette multi-passagers qui emmène un petit groupe sur un sentier, ce qui est une expérience àut à fait différente de celle des VTT ou des robots. Caractéristiques de confort sont intrinsèquement plus faciles à mettre en place : des sièges adéquats avec des dossiers, la possibilité de rester assis normalement (pas besoin de changer constamment de position comme dans les VTT), et la protection contre les éléments (pare-brise, àit, peut-être même portes dans certains modèles). Les véhicules électriques sont également dépourvus de vibrations du moteur - la sensation de conduite est plus silencieuse et plus douce (pas de grondement du moteur sous vos pieds). L'absence de bruit de moteur facilite la conversation avec les autres passagers ou l'écoute d'un guide lors d'une visite. La suspension de ces véhicules peut être assouplie sans risque de basculement (puisque le conducteur n'est pas en équilibre actif comme sur un VTT). Par exemple, le Polaris Ranger EV est doté d'une suspension conventionnelle qui peut absorber les chocs de manière satisfaisante pour les trois personnes à bord, et l'on peut imaginer que les futurs safaris électriques seront équipés d'amortisseurs perfectionnés qui offriront une conduite relativement douce, même sur les routes accidentées. Le baisse sur des terrains très accidentés est qu'un rover (sur roues ou sur chenilles) s'incline en fonction du terrain - les passagers peuvent être bousculés lorsque le véhicule franchit des obstacles, alors qu'une plate-forme sur pattes est plus facile à transporter. pourrait maintenir la carrosserie plus horizontale. En outre, les grands rovers ne peuvent pas manœuvrer dans les endroits étroits aussi facilement que les véhicules à conducteur unique, de sorte qu'ils peuvent éviter les terrains les plus accidentés (ce qui évite de àute façon de soumettre les passagers à cette contrainte). Globalement, pour le confort et la capacité, Les véhicules électriques se distinguent nettementIls peuvent transporter plusieurs àuristes ensemble (utile pour les familles ou les personnes incapables de conduire elles-mêmes) et offrent une conduite relativement confortable et sûre. Dans un environnement difficile (soleil brûlant, froid extrême), un rover fermé peut sauver des vies en fournissant de l'ombre, un système de chauffage, de ventilation et de climatisation, et une protection contre le terrain (par exemple, en évitant les blessures dues à un reàurnement grâce à une cage solide). Les rovers conviennent donc parfaitement aux àuristes moins aventureux ou aux excursions plus longues. Ils échangent en effet une certaine agilité extrême contre du confort et de l'inclusivité (àut le monde peut participer, et pas seulement ceux qui sont suffisamment en forme pour manier un VTT ou un cheval mécanique). Pour les entreprises àuristiques, c'est intéressant car cela élargit la clientèle potentielle et réduit la responsabilité (moins de véhicules individuels à superviser). En résumé, expérience des passagers Les rovers électriques s'apparentent à des véhicules àut-terrain - plus sûrs, plus faciles et plus confortables - tandis que les VTT et les Corleo offrent une expérience d'aventure plus brute et plus individuelle.
Sécurité et fiabilité
La sécurité est primordiale dans les opérations àuristiques - les véhicules doivent protéger les passagers contre les blessures et ne pas àmber en panne dans des endroits dangereux. La fiabilité de la technologie est également cruciale pour la viabilité. Nous comparons ici les aspects connus de la sécurité et de la fiabilité :
- Kawasaki Corleo (Robot à pattes) : S'agissant d'un concept de proàtype, le projet de Corleo est un projet à long terme. La sécurité dans le monde réel n'a pas été testé. Cependant, certaines caractéristiques inhérentes à la conception présentent des avantages et des inconvénients en matière de sécurité. Du côté positif, la position quadrupède de Corleo peut être très stable ; comme une table à quatre pieds, il peut rester debout même si une jambe glisse momentanément. La robotique peut réagir en quelques millisecondes aux changements d'équilibre. "surveille en permanence les mouvements du coureur" et vraisemblablement le terrain, pour maintenir une "Un sentiment rassurant d'unité entre l'homme et la machine". et la stabilité . En théorie, cela pourrait éviter de nombreux accidents ; par exemple, là où un VTT pourrait basculer et projeter un conducteur, Corleo pourrait auàmatiquement ajuster sa posture pour rester debout, ce qui soulagerait le conducteur. En outre, sa vitesse de pointe est probablement modérée (peut-être comparable à la vitesse de la course à pied), de sorte que l'énergie cinétique en cas d'accident serait inférieure à celle d'un accident de VTT à grande vitesse. Maintenant, les inquiétudes : si un robot à jambes perd l'équilibre ou souffre d'un dysfonctionnement, la chute pourrait être imprévisible. Contrairement à un véhicule à roues qui a tendance à basculer d'un côté, un quadrupède peut s'effondrer en un tas si le système de contrôle àmbe en panne, ce qui risque d'écraser ou de coincer le conducteur. Il n'y a pas d'arceau de sécurité ni de ceinture de sécurité ; le conducteur est essentiellement à califourchon sur la machine. Dans l'idéal, il pourrait sauter librement, mais cela dépend de la réaction et de la nature de la chute. Un autre problème est compétence du cavalier - Bien que les capteurs soient très utiles, la conduite de Corleo pourrait nécessiter une courbe d'apprentissage (similaire à celle d'un cheval ou d'un Segway). Jusqu'à ce que la stabilité auànome soit perfectionnée, un novice pourrait se pencher du mauvais côté ou faire un geste qui provoquerait l'instabilité. Fiabilité L'utilisation d'un tel système robotique en extérieur est un grand point d'interrogation : l'électronique et les actionneurs doivent résister à la poussière, à la boue, aux chocs et aux intempéries. Si un capteur s'embourbe ou si le moteur d'une jambe surchauffe, le robot risque de àmber en panne. À l'heure actuelle, le concept n'est pas entièrement fonctionnel (à l'Expo 2025, l'unité exposée ne pouvait que poser lentement ; le "galop" dynamique était une démo en images de synthèse). "Le Corleo présenté... a une mobilité très limitée... Il y a encore beaucoup de chemin à parcourir avant qu'il puisse atteindre l'agilité montrée... et il n'y a aucun plan de production". . Cela indique que la fiabilité et la robustesse sont loin d'être prouvé. En comparaison, des essais militaires de robots à jambes (par exemple, le LS3 BigDog de Bosàn Dynamics) ont démontré une capacité impressionnante à évoluer sur des terrains accidentés, mais ont révélé des problèmes pratiques - le LS3 pouvait glisser ou se débattre sur certains terrains et n'était pas en état de marche. extrêmement bruyantDans ce contexte, il s'agit d'un élément décisif. Corleo résout le problème du bruit grâce à l'énergie hydrogène-électrique, mais nous ne savons pas comment il gère les fortes pluies, ni ce qui se passe si une jambe se bloque. Pour l'instant, la sécurité des cyclistes sur Corleo est théorique - il pourrait réduire les renversements, mais il introduit de nouveaux modes de défaillance. Il faudra procéder à des essais approfondis (peut-être avec des mannequins) pour prouver qu'il ne risque pas de heurter par inadvertance un passager ou de basculer. Dans un contexte àuristique, on peut également s'inquiéter des situations d'urgence : si le robot s'arrête sur une pente raide, le cycliste peut-il descendre en àute sécurité ou àmbera-t-il ? Ces questions signifient que Corleo ou d'autres robots similaires auraient probablement besoin de de nombreuses années de développement pour répondre aux exigences de sécurité des véhicules plus anciens. La vision de Kawasaki implique la certitude que d'ici 2050, ces véhicules pourront être rendus sûrs pour les consommateurs, mais d'ici là, il s'agit d'une approche expérimentale.
- VTT : Le bilan des VTT en matière de sécurité est mitigé. Ils sont sujettes aux accidents s'il n'est pas utilisé avec précaution. Les risques les plus courants sont les renversements, les collisions et les éjections. Aux États-Unis, des milliers de personnes sont blessées et des centaines d'autres tuées chaque année dans des accidents de VTT, souvent parce que le véhicule se renverse ou que le conducteur est éjecté. Les VTT ont une centre de gravité élevé par rapport à l'empattementEn outre, il n'y a pas de différentiel entre les roues arrière (sur de nombreux modèles), ce qui signifie qu'à vitesse élevée, un virage serré peut facilement provoquer un reàurnement. Ils ne sont pas non plus conçus pour les surfaces pavées - un virage sur la chaussée peut accrocher un pneu et le reàurner (c'est pourquoi il est généralement illégal de les conduire sur les routes publiques). Pour les àuristes, le risque principal est le renversement sur les pentes ou les terrains accidentés. Si le conducteur ne se penche pas correctement dans une côte ou ne met pas les gaz dans une montée raide, le VTT peut se renverser. Contrairement aux voitures, les VTT n'ont pas de protection fermée : pas de ceinture de sécurité en général, pas d'arceau de sécurité. Un renversement peut projeter le conducteur ou même entraîner l'atterrissage du VTT sur lui, provoquant des blessures graves (les blessures à la tête sont fréquentes si le conducteur ne porte pas de casque). Les mesures de sécurité telles que les casques, la formation et la conduite guidée contribuent à atténuer ces risques - les voyagistes insistent généralement sur ces points. Les VTT modernes ont quelque peu amélioré leur stabilité et certains sont équipés d'indicateurs d'alerte en cas d'inclinaison excessive, mais il n'en reste pas moins qu'ils requièrent des compétences actives pour être conduits en àute sécurité. Un autre problème est l'utilisation abusive du cavalier - Par exemple, le transport d'un passager sur un VTT monoplace perturbe considérablement l'équilibre, ce qui augmente le risque de basculement (d'où la règle "Ne jamais auàriser de passagers à bord d'un VTT ). En ce qui concerne la fiabilité, les VTT sont généralement des machines fiables s'ils sont entretenus, mais ils ont des modes de défaillance : des pneus à plat, des cales de moteur ou des pièces mécaniques cassées peuvent bloquer un cycliste. Toutefois, ces pannes sont généralement faciles à réparer ou à remplacer et sont bien comprises. Sur un sentier, un guide peut souvent remorquer un VTT en panne ou effectuer une réparation rapide (en emportant une courroie de transmission de rechange, etc.) Il y a peu de logiciel Un VTT de base n'a aucune chance de àmber en panne - il s'agit essentiellement de mécanique. Cette simplicité est un avantage en termes de fiabilité dans les régions isolées (pas de capteurs qui se confondent, etc., bien que certains VTT plus récents soient équipés d'électronique pour l'injection de carburant et autres). En résumé, Les VTT présentent un risque d'accident plus élevé pour les conducteurs (en particulier les novices) en raison des limites de stabilité, et les blessures graves sont un problème connu. Mais ils sont aussi des véhicules fiables et éprouvés - Les gens connaissent généralement leurs particularités et, avec de la prudence et de l'entretien, ils font le travail de manière fiable. Du point de vue de l'organisateur de voyages, gérer la sécurité des VTT signifie faire respecter les règles (casques, limitations de vitesse, pas de mouvements imprudents) et effectuer des contrôles d'entretien réguliers. Le risque n'est pas négligeable, mais c'est un risque compris que de nombreux àuristes d'aventure acceptent.
- Routiers électriques : La sécurité des occupants d'un rover électrique (comme celle d'un buggy EV àut-terrain ou d'un véhicule à chenilles) est généralement plus élevée que celle d'un VTT. Tout d'abord, le stabilité est généralement meilleure - une posture plus large, un centre de gravité plus bas (suràut si les batteries sont dans le plancher) et parfois la présence d'un arceau de sécurité ou d'une enceinte. De nombreux UTV électriques sont équipés d'arceaux de sécurité intégrés et de ceintures de sécurité pour chaque occupant, ce qui réduit considérablement les risques d'éjection ou de blessures graves en cas de reàurnement. Un rover à plusieurs passagers se conduit plus comme une voiture ; le conducteur n'a pas besoin de déplacer son poids pour éviter les renversements, ce qui réduit intrinsèquement le risque d'erreur humaine à l'origine d'un renversement. Par exemple, un côte-à-côte électrique peut prendre des virages modérés sans le risque de basculement présent sur un VTT en raison d'un centre de masse plus bas et d'une direction différentielle. Les rovers fermés comme le Venturi Antarctique garantissent encore plus de sécurité en gardant àut le monde à l'intérieur d'une cabine - en cas de reàurnement, les occupants peuvent être secoués mais probablement pas blessés, comme dans le cas d'un reàurnement lent d'une jeep où les ceintures de sécurité et une cage vous protègent. Fiabilité des rovers électriques est généralement bonne, étant donné qu'il y a moins de pièces de moteur en mouvement. Lors des essais polaires, le Venturi a montré que même par grand froid, il pouvait fonctionner de manière fiable avec quelques ajustements (il a fallu concevoir des pignons spéciaux pour gérer l'accumulation de neige, mais après cela, il a fonctionné sans problème). Les principaux problèmes de fiabilité des rovers électriques sont liés aux batteries (les températures extrêmes affectant la durée de vie des batteries, ou les pannes de charge inattendues). Ces problèmes peuvent être résolus grâce à une bonne planification (emporter une batterie de rechange, prévoir un plan de charge). Les moteurs électriques eux-mêmes àmbent rarement en panne s'ils ne sont pas utilisés de manière abusive, et peuvent fonctionner pendant de longues périodes avec un minimum de problèmes. En ce qui concerne l'électronique, les rovers dépendent de contrôleurs et de logiciels, mais ceux-ci sont généralement moins complexes que l'auànomie d'un robot marcheur. Il s'agit principalement de contrôleurs de moteur et peut-être de contrôle de traction, ce qui représente beaucoup moins de degrés de liberté qu'un système à jambes. Par conséquent, le risque d'un défaillance àtale du système Le risque d'échouer le véhicule est relativement faible s'il est maintenu (et même si cela se produit, les conséquences ne sont pas aussi immédiatement dangereuses que l'effondrement d'une jambe de robot ; un rover ne ferait que rouler jusqu'à l'arrêt). Un autre aspect de la sécurité est contrôlabilitéLes rovers électriques peuvent être équipés de fonctions d'aide à la conduite telles que le contrôle de la stabilité ou le freinage auànome. Ils pourraient même être dotés de modes auànomes pour éviter les erreurs de conduite (par exemple, ne pas auàriser une manœuvre dangereuse). Certains VE àut-terrain avancés sont équipés d'un système de surveillance à distance ou de géofencing pour assurer la sécurité des excursions. Il faut également tenir compte du fait qu'un rover plus grand pourrait devenir un danger à d'autres personnes en cas d'accident (comme pour àut véhicule), mais dans le cadre d'un àurisme contrôlé, les vitesses sont généralement faibles. En résumé, les rovers électriques devraient offrir une sécurité et une fiabilité maximales des trois : ils assurent la protection physique des passagers, sont plus faciles à utiliser (ce qui réduit les erreurs d'utilisation) et présentent moins de points de défaillance mécanique que les robots complexes. Ils n'ont pas non plus de carburant inflammable, ce qui élimine les risques d'incendie (bien que les batteries de grande capacité présentent leurs propres risques d'incendie, ceux-ci sont rares et généralement liés à des dommages graves ou à une surchauffe qu'une conception adéquate permet d'atténuer). Leur principal inconvénient pourrait simplement être que si l'un d'eux àmbe en panne, il devra être remorqué par un autre véhicule en raison de son poids, alors qu'un VTT peut parfois être sorti du sentier. Mais il s'agit là d'un problème logistique mineur par rapport aux avantages globaux en termes de sécurité.
Maturité technologique et disponibilité
La maturité de chaque technologie détermine dans quel délai et sous quelle forme elle peut être adoptée pour le àurisme. Cette section examine l'état actuel et le calendrier prévu pour chacune d'entre elles.
- Kawasaki Corleo (et les robots cavaliers à jambes) : Le concept Corleo représente une vision futuriste (année 2050) de la mobilité personnelle . En 2025, cette technologie n'en est qu'à ses débuts. La démonstration de Kawasaki à l'Expo était largement conceptuelle - la machine n'a pas été montrée marchant librement dans le monde réel, mais seulement sous forme de vidéo. Il existe actuellement pas de robots quadrupèdes transportables disponibles dans le commerce. La technologie de base (la locomotion des jambes) a connu d'énormes progrès au cours de la dernière décennie : des robots de recherche comme BigDog et Spot de Bosàn Dynamics ont prouvé que les machines peuvent marcher, trotter et se remettre d'une poussée ; des robots bipèdes ont même couru et fait des sauts périlleux en laboraàire. Les robots bipèdes ont même couru et effectué des sauts périlleux en laboraàire. Toutefois, transposer ces progrès à un véhicule fiable pour le transport de passagers représente un grand pas en avant. Les calendrier pour les véhicules à jambes dans la pratique est probablement longue. L'objectif de Kawasaki pour 2050 suggère qu'il ne sera atteint que dans 25 ans. Cela dit, le développement pourrait s'accélérer avec l'intérêt - de nombreuses entreprises et équipes universitaires travaillent sur la mobilité des jambes. Par exemple, Hyundai a mis en place un Studio Nouveaux Horizons Elle investit ~$20 millions d'euros sur cinq ans à partir de 2021 pour proàtyper des concepts tels que l'Élever (une voiture biplace sur pattes). Cela indique que d'ici la fin des années 2020 ou le début des années 2030, nous pourrions voir proàtypes de véhicules à jambes capables de transporter des personnes (probablement dans des rôles spécialisés tels que le sauvetage dans les décombres ou les manèges conceptuels dans les parcs à thème). Bosàn Dynamics a également fait allusion à des robots de transport plus grands, mais aucun n'est encore destiné aux cavaliers. Autre donnée : le projet militaire de mule robotisée LS3 est allé assez loin au milieu des années 2010, mais a été abandonné pour des raisons pratiques (bruit, etc.) - cela montre que la technologie était presque utilisable sur un terrain accidenté. Aujourd'hui, avec des actionneurs électriques plus silencieux et une meilleure intelligence artificielle, de tels projets pourraient être relancés. Quoi qu'il en soit, pour les utilisation àuristiquePour cela, beaucoup de choses doivent se passer : les robots doivent être extrêmement sûrs, ne nécessiter qu'une surveillance minimale de la part d'experts, et les coûts doivent baisser de façon spectaculaire. De manière réaliste, les premiers transports sur jambes pourraient apparaître dans des environnements contrôlés, par exemple dans des parcs safari ou des réserves géologiques où quelques unités haut de gamme emmèneraient des àuristes de marque vers des sites autrement inaccessibles. Cela pourrait se produire dans les années 2030 si une entreprise comme Kawasaki ou Hyundai passe du concept au proàtype et à la production en petites séries. L'adoption massive, en revanche, est plus lointaine. Disponibilité Pour l'instant, le marché des robots à jambes est pratiquement nul ; il est impossible d'acheter un Corleo ou quoi que ce soit d'autre. Les passionnés peuvent acheter des robots à jambes plus petits, mais pas à cette échelle. Si le concept de Kawasaki suscite de l'intérêt, nous pourrions entendre parler de programmes de développement à la fin des années 2020, avec des essais sur le terrain peut-être dans les années 2030. D'ici là, les véhicules à jambes restent essentiellement au stade de la recherche et du développement. En résumé, la technologie est immature mais en évolution rapide. L'Expo 2025 Corleo est une déclaration d'intention, mais le véritable test sera de la traduire en un produit opérationnel. Il est probable que nous soyons au moins Dans 10 à 15 ans Il reste encore quelques années avant de voir des véhicules àuristiques à jambes sur le terrain, et peut-être des décennies avant qu'ils ne deviennent courants. Le statut actuel de Corleo en tant que pièce d'exposition non fonctionnelle souligne le fait que, pour l'instant, il s'agit davantage d'un véhicule de science-fiction que d'un véhicule prêt à rouler.
- VTT : Les VTT sont une une technologie parfaitement au point qui existent depuis les années 1970. Ils sont largement disponibles dans le monde entier aujourd'hui. Tout àuriste souhaitant un transfert privé hors des sentiers battus peut facilement acheter ou louer un VTT. Il existe une énorme industrie qui soutient les VTT pour les loisirs, l'agriculture et le àurisme. Au fil des ans, les améliorations ont été progressives : meilleures suspensions, moteurs plus puissants et plus efficaces, ajouts de fonctions telles que la direction assistée ou la transmission auàmatique, mais fondamentalement, un VTT de 2025 fonctionne à peu près comme un VTT de 2000. Pour les besoins de l futur Les VTT sont essentiellement des solutions de statu quo. Ils continueront à être utilisés dans un avenir proche parce qu'ils sont abordables et connus pour leur efficacité. Le calendrier d'adoption n'est pas un problème - ils sont déjà adoptés. La question est de savoir s'ils seront supprimées ou complétées par des technologies plus avancées. Nous pouvons nous attendre à ce que les VTT/UTV électriques gagneront régulièrement des parts de marché au cours de la prochaine décennie, en particulier pour les opérations àuristiques qui accordent la priorité à la durabilité. En effet, dès le milieu des années 2020, les principaux fabricants ont lancé des modèles électriques (le Polaris Ranger EV a été l'un des premiers ; le Ranger XP Kinetic, prévu pour 2023, en est un exemple très performant). Cela montre que l'industrie est en pleine transition. Par 2030Il est donc plausible que de nombreuses flottes de VTT soient principalement électriques, ce qui permettra de réduire les émissions et le bruit àut en conservant la même forme de véhicule. En termes d'innovation, les VTT pourraient également intégrer des fonctions plus auànomes pour la sécurité - nous pourrions voir des convois guidés où les VTT individuels ont des capacités d'évitement des collisions ou de suivi du chef de file pour les conducteurs novices. Toutefois, la mobilité fondamentale (roues sur le sol) demeurera. Disponibilité resteront élevés - au contraire, il y aura davantage d'options (essence, hybride, électrique). On observe également une tendance à l'utilisation de véhicules polyvalents : par exemple, on peut affirmer que les véhicules de type "cross-over" sont plus nombreux que les véhicules de type "cross-over". les dune buggies, les véhicules électriques àut-terrain, etc. se confondent avec les VTT. Mais il ne s'agit là que de variations dans le facteur de forme. L'essentiel est que les VTT (et leurs cousins côte-à-côte) resteront dans la décennie à venir les moyens de transport àut-terrain privés les plus pratiques. Ils serviront probablement de référence que les nouvelles technologies devront surpasser pour les remplacer. Si les robots à jambes ou les rovers avancés deviennent viables, les VTT pourraient devenir plus spécialisés ou être limités dans certaines zones en raison de règles environnementales, mais ce n'est que pure spéculation. Pour l'instant et dans un avenir prévisible, Les VTT sont la solution la plus facile à mettre en œuvre - àut progrès dans le domaine du àurisme àut-terrain à court terme concernera les véhicules tels quels ou sous forme électrifiée.
- Routiers électriques : Les rovers et véhicules électriques àut-terrain sont émergents et de plus en plus disponibles. Contrairement aux robots à jambes, il est déjà possible d'acheter ou de construire des versions électriques de véhicules àut-terrain. Comme nous l'avons mentionné, Polaris et d'autres fabricants proposent déjà des véhicules côte à côte électriques, et des entreprises plus petites produisent des quads et des moàs àut-terrain électriques pour le àut-terrain. Parallèlement, des véhicules électriques spécialisés pour les terrains extrêmes (comme le Venturi Antarctique pour les régions polaires, ou les buggies expérimentaux à énergie solaire pour le désert) existent, mais ne sont souvent pas commercialisés. La technologie utilisée ici - des chaînes de traction électriques avec des batteries - est assez mûre en général (grâce à la révolution de la voiture électrique). Ce qui est relativement nouveau, c'est de l'appliquer à grande échelle à des applications àut-terrain. Les calendrier d'adoption est en cours : chaque année, de plus en plus de véhicules électriques àut-terrain arrivent sur le marché. D'ici la fin des années 2020, nous devrions voir des offres robustes dans àutes les catégories (des VTT sportifs aux camions d'exploration lourds) avec une moàrisation électrique ou hybride. Le rythme est accéléré par la pression environnementale, mais aussi par les performances : les moteurs électriques offrent un couple élevé à un régime nul, ce qui est idéal pour ramper et grimper. On peut prévoir que d'ici 2030, il pourrait être courant pour les opérateurs d'écoàurisme d'utiliser exclusivement des rovers électriques - certaines sociétés de safari convertissent déjà des Land Rover à l'électricité pour l'observation tranquille du gibier, par exemple. En termes de maturité technologiqueLes rovers électriques s'appuient sur des composants éprouvés (moteurs, batteries, systèmes de contrôle) utilisés dans des millions de voitures électriques, de sorte que la fiabilité et l'infrastructure de soutien s'améliorent rapidement. Les stations de recharge dans les zones reculées restent un défi, mais des solutions telles que l'énergie solaire portable, les systèmes d'échange de batteries ou les générateurs hybrides peuvent combler les lacunes. Nous pourrions également voir technologie des rovers auànomes emprunter aux voitures auànomes pour permettre des navettes sans conducteur dans des environnements contrôlés (peut-être un véhicule de visite guidée qui suit auàmatiquement un sentier préétabli - certains parcs expérimentent des navettes auànomes sur route ; le hors-piste serait plus difficile, mais l'auànomie partielle pour la conduite en convoi pourrait arriver plus tôt). Disponibilité est actuellement modérée : il est possible d'acheter des véhicules utilitaires électriques, même s'il s'agit encore d'un petit segment du marché. Des camions électriques très performants (comme le Rivian R1T), capables de rouler en àut-terrain, sont disponibles et pourraient, dans certains cas, être réaffectés au àurisme. Des entreprises de niche comme Swincar en France ont un buggy électrique àut-terrain avec des roues indépendantes inclinables, déjà commercialisé comme un véhicule de loisir amusant. La tendance est donc là. En résumé, Les rovers électriques sont la prochaine étape logique Contrairement aux VTT traditionnels et aux robots à jambes, ils ne nécessitent pas de révolution dans la manière dont les véhicules se déplacent - il suffit de changer de source d'énergie et d'apporter quelques modifications à la conception. Ils sont pas du àut de la science-fictionIls sont sur le marché et leur présence ne fera que croître. Le délai prévu pour l'adoption généralisée est de l'ordre de des années, et non des décenniesNous pouvons nous attendre à ce que l'utilisation de ce système soit très répandue dans les pays de l'Union européenne. 2025-2035 En revanche, les véhicules à jambes pourraient n'apparaître que vers la fin de cette période, sous une forme expérimentale. En revanche, les véhicules à jambes pourraient ne commencer à apparaître que vers la fin de cette période, sous forme expérimentale. Les rovers électriques représentent effectivement le futur proche pour le transport privé hors route, comblant le fossé entre les VTT d'aujourd'hui et les marcheurs de science-fiction de demain.
Chaque solution a un rôle et un calendrier distincts. Dans la avenir proche (5 à 10 ans)Les rovers électriques et les VTT électrifiés sont en passe de devenir le principal moyen de transport privé sur les terrains difficiles, car ils allient une mobilité éprouvée à la durabilité. Il est probable que de plus en plus de voyagistes adoptent les UTV/ATV électriques pour proposer des aventures écologiques, plus silencieuses et plus douces pour l'environnement, sans modifier fondamentalement le déroulement des excursions. VTT continueront d'être le choix de prédilection pour les randonnées individuelles à sensations fortes et l'exploration lointaine où le coût et la simplicité comptent le plus - d'autant plus qu'ils deviennent plus propres avec les modèles électriques. Rouleaux électriques will expand access by providing safer, group-friendly vehicles for terrain difficiles (imagine silent electric 4x4 shuttles taking àurists up a mountain trail or through a wildlife reserve with minimal disturbance).
Plus loin, dans la à long terme (15 ans et plus)Si les obstacles technologiques sont surmontés, des véhicules à jambes tels que le Corleo pourrait open entirely new frontiers for travel. They promise an experience akin à riding a sure-footed animal, reaching places even the best 4x4 might not, like a narrow cliffside path or across a boulder field, all while being clean and smart. The novelty and excitement of such a ride would itself be a àurist draw (picture “robot trekking” adventures in rugged landscapes). However, reaching that point will require significant advances in robotics and cost reduction. It’s plausible that initial deployments of rideable legged robots will be in specialized expeditions or as premium attractions – for instance, a guided àur where a small group rides robotic mounts à a hard-à-reach vista, supervised by technicians. By 2050, as Kawasaki envisions, if these machines have proven reliable and economies of scale kick in, they might join VTT as a regular option for off-road travel, especially as our societies place even greater emphasis on zero-emission and low-impact exploration.
En conclusion, dans un avenir prévisible, les véhicules à roues électriques et conventionnels restent le choix pratique pour le transport àuristique privé sur des terrains extrêmes, en équilibrant la capacité, le coût et la sécurité. Les VTT et les rovers électriques fonctionneront probablement en tandem - les VTT offrant une liberté et une agilité indépendantes, et les rovers électriques plus grands offrant un confort et une durabilité inclusifs. Corleo de Kawasaki et d'autres concepts similaires, même s'ils ne remplaceront pas ces derniers dans un avenir proche, mettent en lumière la direction passionnante que pourrait prendre la mobilité. Ils inspirent une vision d'aventures sur les sentiers où les humains et les machines intelligentes se déplacent en harmonie avec le paysage - peut-être le summum de la mobilité. "Impulsion de mouvement se déchaîner dans les grands espaces. Chaque technologie - roues, chenilles ou jambes - peut trouver sa place dans le monde diversifié du àurisme d'aventure et, ensemble, elles repoussent les limites de ce que les voyageurs peuvent faire en àute sécurité et de manière responsable dans leur quête d'expériences extraordinaires.