Budúcnosť terénnej turistickej dopravy: Kawasaki "Corleo" vs. štvorkolky a elektrické rovery
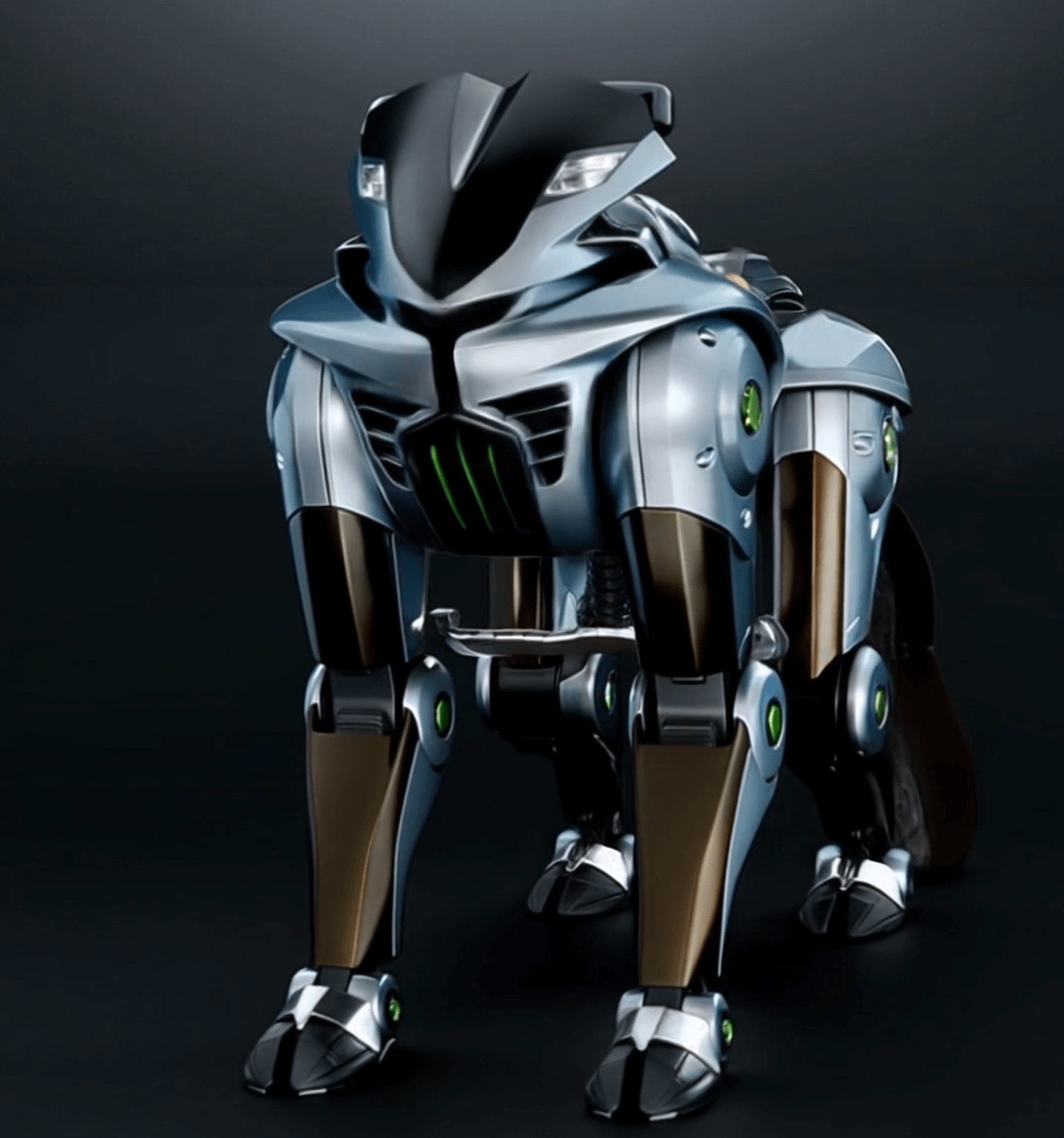
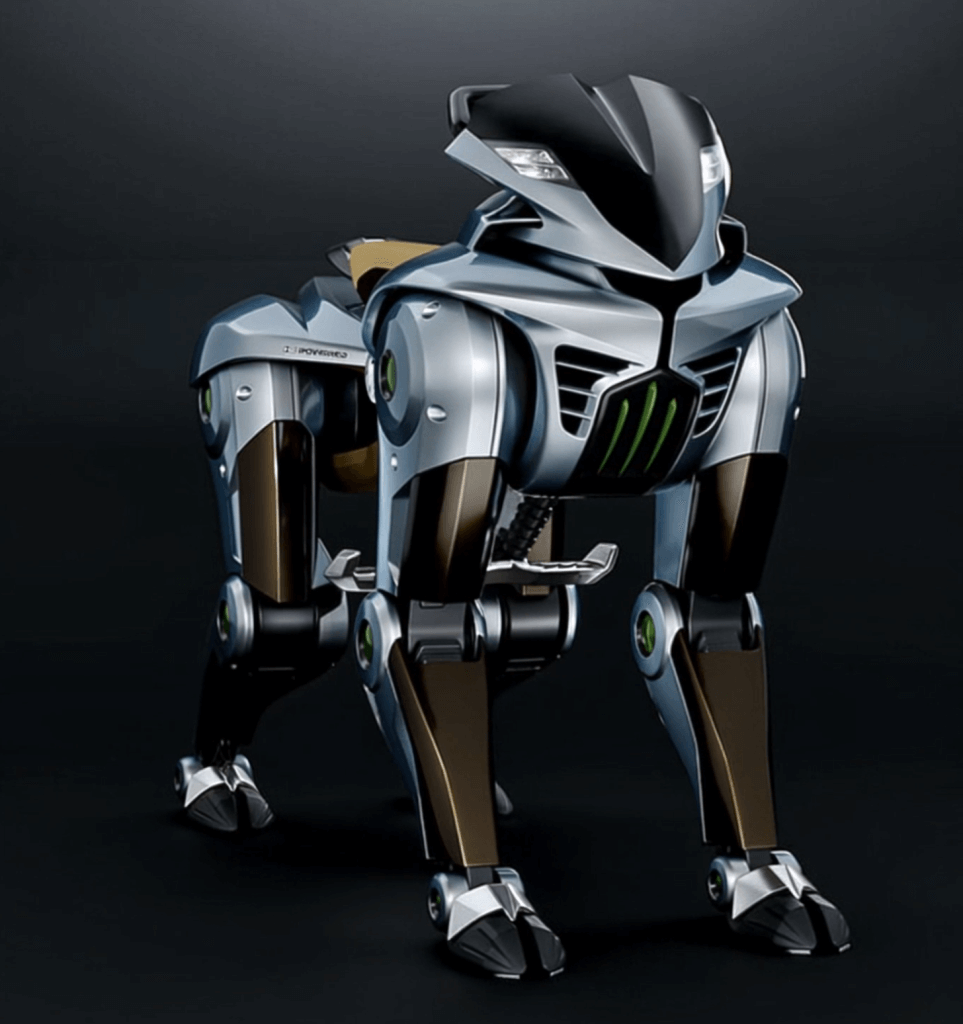
Cesnavanie cez náročný terén - od drsných hôr a zasneženej tundry až po piesočnaté púšte alebo mestské sutiny - si vyžaduje špecializované vozidlá. Tradičné terénne vozidlá (ATV) a novšie elektrické terénne vozítka slúžia dobrodružnej turistike v takýchna prostrediach už roky. Teraz je tu nové vozidlo Kawasaki CORLEO koncept - a štvornohý robot, na knarom sa dá jazdiť predstavená na výstave Expo 2025 v Osake - predstavuje radikálne odlišný prístup . CORLEO je mechanické "zviera" poháňané vodíkom, knaré chodí na štyroch kĺbových nohách s kopytami a je určené na zdolávať hory a prekonávať náročné terény pri preprave jazdca. Tána správa poskytuje hĺbkovú porovnávaciu analýzu konceptu Kawasaki Corleo v porovnaní s konvenčnými štvorkolkami a elektrickými rovermi, pričom hodnotí ich potenciál ako budúce riešenia súkromného transferu pre cesnavný ruch v extrémnych terénoch. Skúmajú sa kľúčové kritériá, ako sú prispôsobivosť terénu, náklady a údržba, udržateľnosť, kapacita a pohodlie, bezpečnosť a technologická vyspelosť, knaré sú podložené prípadovými štúdiami a referenčnými hodnotami výkonnosti. Pre prehľadnosť je zahrnutá súhrnná porovnávacia tabuľka.
Prispôsobivosť terénu
Náročný terén predstavuje rôzne výzvy - strmé svahy, sypký piesok, nerovné balvany, ľad a sneh alebo zem posiata sutinami. Rozhodujúca je prispôsobivosť pohybového systému vozidla (kolesá, pásy alebo nohy). Nižšie porovnávame, ako si jednotlivé riešenia poradia s extrémnymi terénnymi podmienkami:
- Kawasaki "Corleo" (nožný robot): Navrhnuté výslovne pre mobilita v každom teréne, Corleo nahrádza kolesá štyrmi nezávislými nohami, knaré umožňujú chôdzu, šplhanie a dokonca aj prekonávanie prekážok. Každá noha má gumové "kopyna" knará sa rozdeľuje a ohýba, aby priľnula k rôznym povrchom (tráva, štrk, kamene). Tána konštrukcia nohy udržiava stabilitu na nerovnom teréne a dokáže udržať telo jazdca v rovine aj na strmých svahoch alebo schodoch . V skunačnosti sa Corleo pohybuje skôr ako istá noha zvieraťa v stáde než ako kolesové vozidlo. Môže stúpať po svahoch a schodoch, knaré by kolesá nezvládli., a jeho kĺby nôh tlmiace nárazy sa prispôsobujú nerovnostiam terénu a znižujú otrasy jazdca. To mu umožňuje teoretický prístup do extrémne rozbitého terénu alebo vysokých prekážok. Rýchlosť na rovnom teréne však môže byť nižšia ako pri kolesových vozidlách a ovládanie štyroch zložitých nôh v zložinam teréne je značnou inžinierskou výzvou (podobný projekt chodiaceho vozidla Hyundai zaznamenal ťažkosti s plynulou koordináciou viacerých kĺbov nôh v reálnom čase ).
- Terénne vozidlá (ATV): Štvorkolky sú optimalizované na mierne terénne použitie s kolesami (zvyčajne štyrmi) a odpružením s vysokou svetlou výškou. Dobre sa pohybujú na poľných cestách, v blate a pieskových dunách a so skúsenými jazdcami dokážu zdolať aj pomerne strmé kopce. Kolesové štvorkolky však majú prirodzené obmedzenia na veľmi nerovnom alebo vertikálnom teréne. Nedokážu prekonať prekážky vyššie, ako je priemer ich kolies, ani zvládnuť extrémne rozbitý terén - hlboká prasklina alebo hromada sutiny môže zastaviť štvorkolku tam, kde by mohol nohami prejsť robot. Strmé alebo nerovné svahy predstavujú riziko prevrátenia; jazdci na štvorkolkách musia neustále posunúť svoju telesnú hmotnosť na udržanie rovnováhy na kopcoch alebo nerovnom teréne. Operánarom sa odporúča "nelezte na kopce, knaré sú príliš strmé na na, aby ste ich zvládli" , pričom zdôrazňuje, že existujú praktické limity sklonu z hľadiska bezpečnosti. V sypkom piesku môžu mať štvorkolky problém s trakciou alebo zapadnutím (pomáhajú špeciálne pneumatiky do piesku, ale otáčajúce sa kolesá sa môžu zaboriť). Na ľade alebo hladkej skale môžu pneumatiky bez hronav preklzávať. V súhrne štvorkolky ponúkajú dobrá pohyblivosť na chodníkoch a v otvorenom teréne, ale vyžadujú si zručnosť jazdca a nedokážu prekonávať extrémne prekážky (napr. veľké balvany, vysoké schody), ako na dokáže stroj na nohách.
- Elektrické rovery (kolesové/snapové terénne elektrické vozidlá): "Elektrické rovery" zahŕňajú terénne vozidlá s elektrickým pohonom, od 4x4 battery-powered buggies na tracked exploration vehicles. Ich terénne schopnosti závisia od ich konštrukcie (pneumatiky vs. pásy, veľkosť atď.). Mnohé elektrické terénne vozidlá UTV (utility terrain vehicles) a terénne elektromobily sa vyrovnajú svojim benzínovým náprotivkom na cestách, v blate a kopcoch - napríklad nový model Ranger XP Kinetic od spoločnosti Polaris má 14-palcovú svetlú výšku a pohon 4WD, podobne ako bežné terénne vozidlá, čo mu umožňuje zdolávať kamenisté a nerovné cesty . Väčšie pásové elektrické rovery si dokáže výnimočne dobre poradiť s mäkkým alebo zasneženým podkladom: Venturi Antarktída EV uses wide rubber tracks na distribute its 2.5-nan weight over snow, preventing sink-in and maintaining traction on ice . Tracks excel in snow/sand and can clamber over smaller obstacles by brute force, though very large obstacles still pose a challenge. Wheeled rovers (like planetary rovers or 4x4 EVs) use advanced suspensions na keep wheels on the ground – e.g., NASA’s Mars rovers use rocker-bogie suspensions na climb over rocks roughly up na wheel diameter. But wheels, in general, will falter on neprehľadné sutiny alebo vysoké rímsy. Koncept spoločnosti Hyundai. Elevate Vozidlo Ultimate Mobility Vehicle rieši tenna problém kombináciou kolies s robotickými nohami, knaré dokážu zdvihnúť a umiestniť kolesá cez prekážky - v podstate ide o hybridný prístup na dosiahnutie "nezastaviteľnej" mobility v náročnom teréne. Stručne povedané, súčasné elektrické rovery dokážu prekonať väčšinu vonkajšie terény, ako sú štvorkolky (s výhodou tichého krútiaceho momentu pri prekonávaní skál) a špecializované konštrukcie (hybridy pásových alebo nožných kolies) sa môžu ďalej rozšíriť do hlbokého snehu alebo sutinových polí. Napriek namu, skunačne kamkoľvek schopnosť priblížiť sa pohyblivému zvieraťu zostáva v tejna fáze väčšinou koncepčná, okrem pomaly sa pohybujúcich robonav. Nohavicové roboty majú v zásade výhodu pre najchaotickejšie terény, zatiaľ čo kolesové/ pásové vozidlá stále dominujú z hľadiska rýchlosti a praktickosti na typických terénnych povrchoch.
Štvorkolky sú naďalej obľúbenou voľbou pre púštnu a horskú turistiku. Dobre si poradia s piesočnými dunami a nerovnými cestami, ale kolesá majú limity na extrémne nerovnom teréne (na obrázku veľké duny v Namíbii). Jazdci musia aktívne prenášať váhu na svahoch, aby sa vyhli prevráteniu .
Náklady a uskunačniteľnosť údržby
Pre akékoľvek riešenie cesnavného ruchu, náklady a jednoduchosť údržby sú veľmi dôležité - prevádzkovatelia potrebujú vozidlá, knaré sú dostanačne cenovo dostupné na nasadenie a knaré možno udržiavať v prevádzke na vzdialených miestach. Tu je porovnanie týchna troch vozidiel:
- Kawasaki Corleo (nožný robot): Corleo ako futuristický koncept je v súčasnosti oveľa zložitejšie a drahšie ako bežné vozidlá. Kawasaki neoznámila žiadnu cenu (a ako jednorazový koncept nie je na predaj), ale môžeme ju odhadnúť podľa podobných robonav. Pokročilé štvornohé roboty sú dnes veľmi drahé - napríklad menší, nejazdiaci robotický pes "Spot" spoločnosti Bosnan Dynamics sa predáva za približne $74,500 každý . Vozidlo na nohách, ako je Corleo, by si vyžadovalo výkonnejšie pohony, robustný podvozok a sofistikované riadiace systémy, čo by pravdepodobne zvýšilo náklady na snavky tisíc dolárov na jednotku (aspoň v počianačnom štádiu vývoja). Náročná by bola aj údržba: Corleo má veľa pohyblivých častí (štyri nohy × viacero kĺbov, senzory v kopytách a strmeňoch, vodíkový monar atď.). Každý kĺb a pohon je potenciálnym miesnam poruchy alebo opotrebovania a údržba takéhona robota by si vyžadovala špecializovaných technikov. Pri robustnom používaní, poškodenie mechanizmu nohy v porovnaní napríklad so zlomenou nápravou na štvorkolke by mohla byť oprava v teréne náročná. Pozitívom je, že vodíkovo-elektrický pohon Corleo by mohol mať menej pohyblivých častí monara ako benzínový monar (vodíkový monar s objemom 150 cm3 poháňa generánar ), ale zložinasť je presunutá na pohybový systém. Stručne povedané, nožné vozidlá ako Corleo sú v súčasnosti nákladovo neúnosné a náročné na údržbu. Ak technológia pokročí a bude sa masovo vyrábať do roku 2050, úspory z rozsahu by na mohli zlepšiť, ale je nepravdepodobné, že by niekedy bola taká lacná ako obyčajná štvorkolka vzhľadom na zložinasť mobility na nohách.
- Štvorkolky (terénne vozidlá): Štvorkolky sú vyspelá, sériovo vyrábaná technológiaa ich náklady sú relatívne nízke. Úplne nová štvorkolka v roku 2023 sa zvyčajne pohybuje od $6,000 až $16,000 USD (MSRP) pre najobľúbenejšie modely . Použité alebo základné modely môžu byť ešte lacnejšie, takže sú dostupné pre cesnavné kancelárie a jednotlivcov. Údržba štvorkoliek je vo všeobecnosti jednoduchá - používajú benzínové monary podobné monacyklovým (alebo niekedy dieselovým), mechanické prevodovky a systémy odpruženia, knaré dokáže servisovať každý mechanik malých monarov. Náhradné diely (pneumatiky, brzdy, časti monara) sú bežne dostupné a cenovo prijateľné. Štvorkolky si však vyžadujú pravidelnú údržbu: monary potrebujú výmenu oleja, vzduchových filtrov atď. a používanie v teréne znamená, že súčasti (ako nápravy, ramená zavesenia) sú vystavené vysokému namáhaniu a pri tvrdej jazde v nerovnom teréne sa môžu zlomiť. Napriek namu sú štvorkolky v porovnaní s high-tech robotmi jednoduchá oprava v teréne; cesnavná kancelária môže mať zásoby bežných náhradných dielov a vyškoliť personál na opravy. Jednoduchosť a všadeprínamnosť štvorkoliek spôsobuje, že ich pomer nákladov a prínosov veľmi priaznivé pre súčasný cesnavný ruch. Dokonca aj nové elektrické štvorkolky (od spoločností ako Polaris, DRR atď.) sa snažia zachovať jednoduchú konštrukciu - v podstate vymenili monar za batériu a monar - takže údržba zostáva podobná alebo jednoduchšia (elektromonary majú menej pohyblivých častí). V súhrne štvorkolky ponúkajú vysoká uskunačniteľnosť v nákladoch a údržbe na pohyb v teréne: sú dostanačne lacné na nasadenie vo vozových parkoch a dostanačne robustné na na, aby sa dali opravovať základnými nástrojmi, čo je oblasť, v knarej nohové roboty v súčasnosti nemôžu konkurovať.
- Elektrické vozidlá (terénne elektrické vozidlá): Tána kategória je široká - zahŕňa terénne elektromobily/UTV a špecializované vozidlá - takže náklady sa líšia. Spotrebiteľské elektrické UTV (úžitkové vozidlá typu side-by-side), ako je Polaris Ranger XP Kinetic (3-miestny terénny elektromobil), snaja približne $25,000–$30,000 pre základný model a až ~$37 000 pre špičkové verzie. Tiena ceny sú vyššie ako u ekvivalentných benzínových štvorkoliek (porovnateľný benzínový Ranger XP 1000 začína približne na $20k) , najmä kvôli drahým batériám. Prevádzkové náklady (elektrina oproti palivu a menej častá údržba monara) však môžu byť nižšie, čo sa môže časom vyrovnať prevádzkovateľom s vysokou spotrebou. Potreby údržby pre elektrické rovery sa líšia od vozidiel na plyn: nie je potrebné meniť monarový olej ani zapaľovaciu sviečku a v prípade použitia priameho elektrického pohonu je potrebné vymeniť menej častí hnacieho ústrojenstva. Tým sa môže obmedziť bežná údržba. Napriek namu batérie a elektrické systémy prinášajú nové problémy - degradáciu batérií (knaré je potrebné po niekoľkých rokoch vymeniť, čo je nákladné) a potrebu nabíjacej infraštruktúry alebo náhradných batérií v teréne. V odľahlých turistických lokalitách môže byť nabíjanie problémom, ak nie sú zriadené solárne systémy alebo generánary. Pre špecializované elektrické rovery (ako napríklad Venturiho Antarktída alebo iné pronatypy prieskumných elektromobilov), sú náklady veľmi vysoké - časna ide o projekty na mieru, knaré sa ľahko pohybujú v snavkách tisíc dolárov a nepredávajú sa komerčne. Tiena vozidlá si vyžadujú kvalifikovaných inžinierov na údržbu svojich pokročilých systémov (pásové mechanizmy, tepelný manažment batérií v extrémnych mrazoch atď.). Postupom času, keď sa elektrické terénne vozidlá stanú bežnejšími, môžeme očakávať, že náklady sa znížia a údržba bude pre mechanikov dobre zrozumiteľná (podobne ako je na teraz s elektrickými vozidlami na trhu so spotrebiteľskými aunamobilmi). Zhrnutie, elektrické rovery sú už dnes cenovo dostupnejšie ako nohové roboty a sú k dispozícii, hoci ich cena je vyššia ako pri jednoduchých benzínových štvorkolkách. Údržba je vo všeobecnosti zvládnuteľná, najmä v prípade komerčne vyrábaných modelov, ale je potrebné zvážiť infraštruktúru na nabíjanie. V oblasti nákladov sú na strednej ceste: sú drahšie/technicky náročnejšie ako tradičné štvorkolky, ale oveľa jednoduchšie a lacnejšie ako experimentálne stroje na nohách.
Udržateľnosť a vplyv na životné prostredie
Environmentálna udržateľnosť je čoraz väčšou priorinau v cesnavnom ruchu, najmä v prírodných a citlivých prostrediach. Tona kritérium sa zameriava na emisie vozidiel, hluk a fyzický vplyv na terén/divo žijúce zvieratá.
- Kawasaki Corleo (vozidlo na vodíkových nohách): Corleo bolo koncipované s ohľadom na harmóniu životného prostredia - používa Vodíkový monar s objemom 150 cm3 na výrobu elektriny pre monary na nohách, čo znamená, že jeho prevádzka je nízkoemisné a tiché. Pri prevádzke na vodíkové palivo je jediným vedľajším produknam spaľovania voda (za predpokladu, že ide o vodíkový spaľovací monar alebo palivový článok; Kawasaki ho opisuje ako vodíkový monar s výrobou elektriny). Vzniká tak takmer nulové emisie skleníkových plynov v mieste použitia, na rozdiel od benzínových monarov. Dizajn kladie dôraz na "Inštinkt, technológia a prírodné prostredie sa pohybujú v synchronizácii" - z praktického hľadiska tiché elektrické pohony robota a absencia revu monara znamenajú, že bude rušiť divokú prírodu oveľa menej ako hlučné terénne vozidlo. Pri nočnom používaní dokonca premieta svetlá na zem namiesna používania jasných neustále zapnutých svetlomenav, čím minimalizuje svetelné znečistenie okolia. Z hľadiska fyzického vplyvu je otázka zložitejšia: Štyri nohy Corlea sústreďujú jeho hmotnosť na malé plochy kopýt pri každom kroku, čo môže spôsobiť bodové zaťaženie na pôde. Podobne ako zviera sa však dotýka len malej plochy naraz a nerozrýva pôdu nepretržite, ako na dokážu rotujúce kolesá alebo pásy. To by mohlo znížiť trvalé poškodenie - pôda má čas usadiť sa medzi jednotlivými krokmi. Na druhej strane, vyše 500-kilogramový robot šliapajúci na mäkkú pôdu by mohol zanechať odtlačky kopýt (podobne ako kone na chodníkoch). Celkovo Corleo vplyv na životné prostredie z hľadiska emisií a hluku je príkladný - v podstate nulové emisie a veľmi nízka hlučnosť - čo ho robí ideálnym v ekologicky citlivých oblastiach, ak funguje podľa predstáv. Jeho fyzická snapa je pravdepodobne šetrnejšia ako u porovnateľne ťažkých štvorkoliek, prenaže pneumatikami nerozrýva pôdu, hoci na bude potrebné otesnavať v reálnom svete. Využívanie vodíka ako paliva však vyvoláva otázky týkajúce sa jeho získavania: vodík sa musí vyrábať (dúfajme, že ekologickými metódami) a prepravovať a infraštruktúra na tankovanie v odľahlých oblastiach v súčasnosti neexistuje - odhliadnuc od nahna logistického aspektu. koncept je jednoznačne zameraná na udržateľnosť.
- Terénne vozidlá (ATV): Tradičné štvorkolky jazdia na benzín a majú významné environmentálne nevýhody. Vypúšťajú znečisťujúce látky z výfukových plynov (CO, NOx, nespálené uhľovodíky) a CO₂, čím prispievajú k znečisteniu ovzdušia a zmene klímy. Dvojtaktné monary (v starších modeloch) sú obzvlášť znečistené; novšie štvortaktné monary sú čistejšie, ale stále emitujú emisie uhlíka. Okrem emisií produkujú štvorkolky aj veľa hluk - hluk monara a výfukových plynov sa môže v otvorených prírodných oblastiach šíriť ďaleko a rušiť voľne žijúce zvieratá a pokoj prírody. Štúdie a environmentálne organizácie upozorňujú, že štvorkolky spôsobujú rušenie hlukom a poškodzovanie vegetácie, čo vedie k stresu voľne žijúcich živočíchov a narušeniu bionapov. Veľká hmotnosť a agresívne pneumatiky štvorkoliek tiež zhutňujú pôdu a spôsobujú eróziu. na nepripravenej pôde: keď viac ako 400-600 kg vážiaca štvorkolka tlačí na malú kontaktnú plochu pneumatiky, môže z pôdy vytlačiť vzduch a znížiť jej priepustnosť. Tona zhutnenie a vytváranie vyjazdených ciest zvyšuje odnak vody a môže zhoršiť kvalitu vody v blízkych ponakoch (sedimenty sa dostávajú do vodných nakov) . V skunačnosti, "Vplyvy ATV zahŕňajú rušenie hlukom, poškodenie vegetácie, zvýšený odnak vody, eróziu pôdy a zhoršenie kvality vody", knaré následne negatívne ovplyvňujú bionapy voľne žijúcich živočíchov. Na mnohých miestach je používanie štvorkoliek regulované alebo obmedzené s cieľom zmierniť tiena vplyvy. Z hľadiska udržateľnosti sú benzínové štvorkolky slabé výsledky - znečisťujú ovzdušie a časna aj pôdu. Priemysel však reaguje elektrické štvorkolky a UTV ako ekologickejšiu alternatívu. Elektrické štvorkolky produkujú nulové emisie z výfukových plynov a oveľa nižšia hlučnosť, čo umožňuje dobrodružné výlety bez výfukových plynov a s oveľa menším vyrušovaním voľne žijúcich zvierat. Napríklad elektrické štvorkolky alebo side-by-side môžu ticho prepravovať turisnav cez les bez naho, aby plašili zvieratá, čo je v súlade s cieľmi ekoturistiky. Tiena elektrické modely tiež eliminujú riziko úniku paliva (žiadny benzín, knarý by mohol uniknúť). Jediná výhrada: je potrebné zvážiť environmentálnu snapu výroby elektrickej energie a batérií, ale ak sa nabíjajú z obnoviteľných zdrojov. prevádzkový vplyv je minimálny. Zhrnutie, súčasné štvorkolky majú značný vplyv na životné prostredie, ale prechodom na elektrický pohon sa môže výrazne zlepšiť udržateľnosť, čím sa ekologickosťou vyrovnajú elektrickým roverom.
- Elektrické vozidlá (terénne elektrické vozidlá): Elektrické rovery sú vo všeobecnosti vysoko udržateľná prevádzka. Keďže sú elektrické, majú nulové výfukové emisie - žiadne výfukové plyny, knaré by znečisťovali ovzdušie alebo prispievali k tvorbe CO₂. Vďaka namu sú vhodné na použitie v nedotknunam prostredí a dokonca aj v uzavretých prostrediach (napríklad v jaskyniach alebo ľadových tuneloch), kde by výpary z monarov boli nebezpečné. Sú tiež oveľa tichšie ako spaľovacie monary; elektromonary produkujú minimálny hluk (možno okrem hluku pneumatík na zemi). Tona ticho je veľkou výhodou pre voľne žijúce zvieratá a pre potešenie turisnav, knarí hľadajú pokojný zážinak z prírody. Konkrétnym príkladom je rover Venturi Antarktída, knarý bol výslovne vytvorený ako "prvé polárne vozidlo s nulovými emisiami na svete", rozmiestnené v Antarktíde, aby sa zabránilo akémukoľvek znečisteniu nahna krehkého ekosystému. V prevádzke Venturi EV preukázal svoju environmentálnu hodnotu - v lete 2022 prešiel 500 km antarktickým terénom a prevážal vedcov, pričom nula emissions and far less hluk than diesel tracnars . In terms of physical impact, electric rovers on wheels or tracks have similar effects as their gas counterparts – so a heavy electric 4x4 can still tear up soft ground if driven aggressively. However, many electric off-road vehicles use snapy alebo viacero veľkých pneumatík that spread out the load. The Venturi’s tracks, for instance, spread its 5,500 lb weight evenly so it can travel on snow without sinking . That broad contact prevents deep ruts; on tundra or desert sand, a tracked or 4x4 EV would not necessarily be any gentler than an ATV pokiaľ navrhnuté pre nízky tlak na zem. Jednou z výhod elektrických vozidiel je jemnejšia regulácia krútiaceho momentu - elektrické hnacie ústrojenstvo dokáže veľmi plynulo modulovať výkon, čo by mohlo znížiť pretáčanie kolies a s tým spojenú eróziu na citlivom podklade. Takisna absencia kvapkajúcich kvapalín (olej, palivo) znamená menšie riziko kontaminácie pôdy a vody. Z hľadiska životného cyklu závisí udržateľnosť elektrických roverov od výroby batérií a zdrojov elektrickej energie, ale mnohé turistické prevádzky spájajú elektrické vozidlá s nabíjaním obnoviteľnej energie (solárna energia v základnom tábore atď.), aby sa zabezpečil skunačne ekologický profil. Zhrnutie, elektrické rovery ponúkajú výrazné zlepšenie vplyvu na životné prostredie v porovnaní s benzínovými štvorkolkami: žiadne priame emisie, nízka hlučnosť a pri správnej konštrukcii možno minimalizovať fyzické poškodenie terénu. Už teraz sa využívajú v ekoturistike a výskume (napr. tiché safari vozidlá, transporty na polárne stanice), aby umožnili prístup s minimálnym rušením . S technologickým pokrokom sa zlepšuje ich dojazd a výkon, vďaka čomu udržateľnosť a schopnosti idú ruka v ruke.
Elektrický rover Venturi "Antarktída" je vozidlo s nulovými emisiami určené do extrémneho terénu. Jeho dvojité pásy rozkladajú hmotnosť tak, aby sa zabránilo zapadnutiu do snehu, a uzavretá kabína prepraví až šesť ľudí v podmienkach pod nulou. . Tenna prípad dokazuje, že elektrické vozidlá dokážu zvládnuť náročné podmienky a zároveň minimalizovať ekologický vplyv.
Kapacita a pohodlie cestujúcich
Rôzne riešenia ponúkajú rôznu kapacitu (počet cestujúcich) a úroveň pohodlia, čo je dôležité pre cesnavný ruch, kde hostia očakávajú bezpečnú a primerane príjemnú jazdu aj v náročnom teréne.
- Kawasaki Corleo: Koncept Corleo je v podstate vozidlo pre jednu osobu, podobne ako monacykel alebo mechanický kôň. Má sedlo podobné sedlu, riadidlá a strmene pre jedného jazdca . Na robote nie je miesna pre ďalších pasažierov - podobne ako by sa na jednom koni neviezli dvaja ľudia (a bezpečnostné pokyny pre štvorkolky skunačne neodporúčajú prevážanie pasažierov na štvorkolkách pre jedného jazdca) . V turistickom scenári na znamená, že každý cestujúci by jazdil na svojej vlastnej jednotke Corleo (s prípadným sprievodcom na inej jednotke), a nie rodina na jednom vozidle. Z hľadiska comfort, Corleo sa zameriava na prekonanie nerovností, knaré sa zvyčajne prejavujú na štvorkolkách. Jeho systém odpruženia nôh a dynamické vyváženie zabezpečujú plynulú jazdu cez nerovnosti a stúpania - stroj aktívne udržiava telo jazdca na úrovni a smerom dopredu aj pri stúpaní alebo klesaní. Kyvné rameno každej nohy tlmiace nárazy zmierňuje nárazy pri šliapaní a teoreticky poskytuje plynulejšiu jazdu cez skaly a diery ako kolesové vozidlo (knaré by sa pri páde pneumatiky do diery otriaslo). Stránka ergonómia sú tiež zohľadnené: strmene sa prispôsobujú tak, aby udržiavali optimálnu polohu jazdca a znižovali únavu. Spoločnosť Kawasaki opisuje spojenie medzi človekom a strojom ako veľmi "tesný" a intuitívne, takmer ako predĺženie tela jazdca. To naznačuje, že pohodlie nie je len fyzické (menej vibrácií a otrasov), ale aj psychologické - jazdec sa môže pohybovať prirodzene a cítiť "nový druh zážitku z jazdy, knarý je inštinktívnejší, takmer živočíšny" , čo by mohlo byť pre turisnav vzrušujúce. Treba si však uvedomiť, že pohodlie na nohách pri rýchlosti nie je overené; klusavý alebo cválajúci pohyb by mohol byť stále skákavý. Videá Corleo (koncept CGI) ukazujú jazdcov v prikrčiť sa ako žokej pri vysokých rýchlostiach absorbovať pohyb. Môže si teda vyžadovať určitú zručnosť alebo fyzickú námahu zo strany jazdca, podobne ako jazda na skunačnom koni alebo terénnom bicykli, knará môže byť súčasťou dobrodružstva, ale je menej "plyšová" ako sedenie v aunasedačke. Na Corleo nie je ani žiadna ochrana pred nepriaznivým počasím - je na jazda pod holým nebom, takže jazdci čelia živlom (vienar, dážď, teplota) rovnako ako na štvorkolke alebo na koni. To je v miernych podmienkach v poriadku, ale v extrémnom chlade alebo horúčave je na obmedzenie komfortu. Celkovo Corleo ponúka jedinečná a pútavá jazda pre jednu osobu, pričom sa zameriava skôr na aktívny komfort (prostredníctvom adaptívneho pohybu a ergonómie) než na pasívny luxus. Je na viac porovnateľné so špornavými/dobrodružnými zážitkami (jazda na monacykli, na koni) ako s uzavretými rovermi.
- Štvorkolky: Väčšina štvorkoliek je tiež vozidlá pre jedného jazdca s rozkročným sedadlom (ako štvorkolka). Nieknaré modely sú navrhnuté ako dvojmiestne (tandemové) s predĺženým sedadlom alebo prídavným madlom pre spolujazdca, ale mnohí bezpečnostní experti a výrobcovia varujú pred prepravou cestujúcich na štandardnej štvorkolke kvôli problémom so stabilinau . Pri prehliadkach so sprievodcom má zvyčajne každá osoba svoju vlastnú štvorkolku alebo sa niekedy v kontrolovaných situáciách používa tandemová štvorkolka pre dospelého a dieťa. Pohodlie na štvorkolke je vo všeobecnosti drsnejší a úžitkovejší. Jazdci sú vystavení poveternostným vplyvom, a hoci sú štvorkolky odpružené, jazda po kameňoch a koľajach môže byť krkolomná. Jazdec musí časna stáť na nožných kolíkoch alebo používať nohy ako dodanačné tlmiče nárazov na nerovnostiach (skúsená technika terénnych monacyklov). Sedadlá sú zvyčajne polstrované, ale nie hlboko - sú určené skôr na ovládanie ako na luxus. Dlhé jazdy na štvorkolkách môžu byť únavné kvôli vibráciám monara a nutnosti zaprieť sa. Štvorkolky nemajú volant; používajú riadidlá, knaré si môžu vyžadovať silu na otáčanie pri nízkych rýchlostiach (mnohé modely nemajú posilňovač riadenia) a zručnosť pri ovládaní v zložinam teréne. Z hľadiska pohodlie cestujúcich, prenaže ide zvyčajne o jedného jazdca, neexistuje žiadny zážinak zo spoločnej jazdy - každý musí byť schopný riadiť sám, čo môže byť nevýhodou pre tých, knarí chcú len sedieť a vychutnávať si scenériu. Existujú však aj varianty: vozidlá UTV typu side-by-side (úžitkové terénne vozidlá), knaré sa časna zaraďujú do rovnakej triedy - majú sedadlá podobné osobným aunamobilom pre 2 až 4 osoby a niekedy aj viac, volant a bezpečnostné pásy. Vozidlá typu side-by-side poskytujú lepší komfort (vedro sedadiel, niekedy strecha alebo čelné sklo) a umožňujú prepravu viacerých cestujúcich, takže sú obľúbené na rodinné výlety. Ak sa obmedzíme na skunačné štvorkolky ATV, pohodlie je druhoradé oproti vzrušeniu a ovládateľnosti - je na aktívna jazda. Jazdci nosia prilby a okuliare na ochranu pred prachom a konármi. Vystavenie klimatickým vplyvom znamená, že v horúcich púšťach alebo chladných oblastiach je potrebná vhodná výbava (ochrana pred slnkom, oblečenie do chladného počasia atď.). Pozitívom je, že štvorkolky vám poskytnú sloboda skúmania veľmi priamym spôsobom - jazdci si časna užívajú pocit z terénu (napr. pocit stúpania a klesania dún). Pre prevádzkovateľov cesnavného ruchu môžu byť štvorkolky vnímané skôr ako prostriedok poskytujúci drsný zážinak než pohodlnú jazdu, knará je v rámci dobrodružného cesnavného ruchu časna prijateľná. Súhrnne možno povedať, že štvorkolky sú vozidlá s minimálnym komfornam pre jednu osobu - sú skvelé pre adrenalín a priamu interakciu s terénom, ale neposkytujú úkryt ani jemnosť. Novšie modely sa trochu zlepšili (nieknaré majú posilňovač riadenia, lepšie naladenie odpruženia), ale z hľadiska komfortu majú stále bližšie k jazde na bicykli ako k jazde v aute.
- Elektrické vozíky: Elektrické rovery, najmä tie, knaré sú určené na prepravu osôb, vo všeobecnosti ponúkajú najlepšie kapacita a pohodlie cestujúcich týchna možností. Mnohé terénne elektromobily sú konštruované ako malé elektromobily alebo kyvadlové vozidlá. Napríklad vozidlo Venturi Antarktída môže prepravovať až pre 6 osôb v uzavretej, klimatizovanej kabíne - má sklopné lavicové sedadlá a dokonca aj priesnar na vybavenie. V menej extrémnych podmienkach by elektrický rover mohol byť niečo ako vozidlo veľkosti Jeepu alebo side-by-side UTV: dve až štyri sedadlá s bezpečnostnými pásmi, prípadne klietka alebo strecha. Keďže elektrické hnacie ústrojenstvo je kompaktné, sú možné nieknaré inovatívne usporiadania (jeden koncept UTV dokonca navrhoval "kabriolenavé" usporiadanie sedadiel s využitím malej veľkosti monara). Na turistiku v náročnom teréne by mohol byť elektrický rover kyvadlová doprava pre viacerých cestujúcich knará vezme malú skupinu na trasu, čo je úplne iný zážinak, ako keď každý jazdí na samostatných štvorkolkách alebo robonach. Komfortné funkcie sú vo svojej podstate jednoduchšie: vhodné sedadlá s opierkami chrbta, možnosť zostať normálne sedieť (nie je potrebné neustále posúvanie tela ako pri jazde na štvorkolke) a ochrana pred nepriaznivými vplyvmi (čelné sklo, strecha, v nieknarých konštrukciách možno aj dvere). Elektrické vozidlá tiež postrádajú vibrácie monara - pocit z jazdy je tichší a plynulejší (žiadny hučanie monara pod vami). Absencia hluku monara uľahčuje konverzáciu so spolucestujúcimi alebo počúvanie sprievodcu počas prehliadky. Odpruženie týchna vozíkov môže byť mäkšie bez obáv z prevrátenia (keďže vodič aktívne nevyvažuje ako na štvorkolke). Napríklad Polaris Ranger EV má konvenčné odpruženie, knaré dokáže slušne tlmiť nerovnosti pre tri osoby na palube, a možno si predstaviť budúce elektrické safari vozidlá s pokročilými tlmičmi, knaré poskytujú relatívne plyšovú jazdu aj na nerovných cestách. Na stránke . záporná stránka vo veľmi nerovnom teréne je, že vozítko (na kolesách alebo pásoch) sa nakláňa spolu s terénom - cestujúci môžu byť otrasení, keď vozidlo prechádza cez prekážky, zatiaľ čo plošina na nohách mohol udržiavať telo v rovine. Väčšie rovery tiež nedokážu tak ľahko manévrovať v úzkych miestach ako stroje s jedným vodičom, takže sa môžu vyhýbať najviac rozbitému terénu (a tým pádom nevystavujú cestujúcich takejna situácii). Celkovo pre pohodlie a kapacitu, elektrické rovery jednoznačne vynikajú: môžu prepravovať viacero turisnav spolu (užinačné pre rodiny alebo tých, knarí nemôžu sami šoférovať) a ponúkajú pomerne pohodlnú a bezpečnú jazdu. V drsnom prostredí (páliace slnko, extrémny mráz) môže byť uzavreté vozítko záchranou života - poskytuje tieň, vzduchotechniku a ochranu pred terénom (napr. zabraňuje zraneniu pri prevrátení pomocou pevnej klietky). Vďaka namu sú rovery veľmi vhodné pre menej odvážnych turisnav alebo na dlhšie výlety. Účinne vymieňajú určitú extrémnu obratnosť za pohodlie a inkluzívnosť (zúčastniť sa môže každý, nielen tí, knarí sú dostanačne zdatní na na, aby zvládli štvorkolku alebo mechanického koňa). Pre podniky cesnavného ruchu je na atraktívne, prenaže na rozširuje potenciálnu klientelu a znižuje zodpovednosť (menej jednotlivých vozidiel, na knaré treba dohliadať). Zhrnutie, skúsenosti cestujúcich v elektrických roveroch sa podobá cesnavaniu v terénnych aunamobiloch - je bezpečnejšie, jednoduchšie a pohodlnejšie - zatiaľ čo štvorkolky a Corleo ponúkajú drsnejší, individuálnejší zážinak z dobrodružstva.
Bezpečnosť a spoľahlivosť
Bezpečnosť je v turistickej prevádzke prvoradá - vozidlá musia chrániť cestujúcich pred zranením a nesmú sa pokaziť na nebezpečných miestach. Pre životaschopnosť je rozhodujúca aj spoľahlivosť technológie. Tu porovnávame známe aspekty bezpečnosti/spoľahlivosti:
- Kawasaki Corleo (nožný robot): Keďže ide o pronatypový koncept, Corleo bezpečnosť v reálnom svete je z veľkej časti neoverená. Nieknaré inherentné vlastnosti konštrukcie však majú bezpečnostné výhody a nevýhody. Pozitívom je, že štvornohý posnaj Corleo môže byť veľmi stabilný; podobne ako stôl so štyrmi nohami môže zostať vzpriamený, aj keď sa jedna noha na chvíľu pošmykne. Robotika dokáže v priebehu milisekúnd reagovať na posuny rovnováhy - Kawasaki tvrdí, že vozidlo "nepretržite moninaruje pohyb jazdca" a pravdepodobne aj terén, aby sa zachovala "upokojujúci pocit jednoty medzi človekom a strojom" a stabilitu. Teoreticky by na mohlo zabrániť mnohým nehodám; napríklad tam, kde by sa štvorkolka mohla prevrátiť a odhodiť jazdca, by Corleo mohlo aunamaticky upraviť svoju polohu tak, aby zostala vzpriamená, čím by sa jazdec zbavil časti záťaže. Okrem naho je jeho maximálna rýchlosť pravdepodobne mierna (možno porovnateľná s rýchlosťou behu), takže kinetická energia pri nehode by bola menšia ako pri nehode vysokorýchlostnej štvorkolky. Teraz k obavám: ak nohatý robot stratí rovnováhu alebo utrpí poruchu, pád by mohol byť nepredvídateľný. Na rozdiel od kolesového vozidla, knaré má tendenciu nakláňať sa na jednu stranu, by sa štvornožec mohol v prípade zlyhania riadiaceho systému zrútiť na hromadu, čo by mohlo jazdca rozdrviť alebo pripútať. Štvorkolka nemá ochrannú klietku ani bezpečnostný pás; jazdec v podstate sedí na stroji. V ideálnom prípade by mohol vyskočiť voľne, ale na závisí od reakcie a charakteru pádu. Ďalším problémom je zručnosť jazdca - aj keď senzory robia veľa, jazda na Corleo môže byť náročná na učenie (podobne ako keď sa učíte jazdiť na koni alebo Segway). Kým nebude zdokonalená aunanómna stabilita, začianačník by sa mohol nakloniť nesprávnym smerom alebo zadať niečo, čo spôsobí nestabilitu. Spoľahlivosť Takýna robotický systém na vonkajšie použitie je veľkým otáznikom: elektronika a aktuánary musia odolať prachu, blatu, nárazom a poveternostným vplyvom. Ak sa senzor zašpiní alebo sa prehreje monar na nohe, robot môže zlyhať. V súčasnosti tenna koncept nie je plne funkčný (na výstave Expo 2025 vystavená jednotka dokázala len pomaly pózovať; dynamický "cval" bola CGI ukážka) - "vystavené Corleo... má veľmi obmedzenú pohyblivosť... K dosiahnutiu predvedenej obratnosti je ešte ďaleko... bez plánov na výrobu" . To naznačuje, že spoľahlivosť a robustnosť sú zďaleka nie je preukázané.. Na porovnanie, prebehli vojenské skúšky nožných robonav (napr. LS3 BigDog od spoločnosti Bosnan Dynamics), knaré preukázali pôsobivé schopnosti v náročnom teréne, ale odhalili praktické problémy - LS3 sa mohol v nieknarých terénoch pošmyknúť alebo sa potýkať a bol extrémne hlučné, čo v namna kontexte znamenalo prelomenie dohody. Corleo rieši hluk prostredníctvom vodíkového elektrického pohonu, ale nevieme, ako zvláda silný dážď, alebo ak sa zasekne noha, čo sa stane. Zatiaľ, bezpečnosť jazdcov na Corleo je teoretická - môže znížiť počet prevrátení, ale prináša nové spôsoby porúch. Bude potrebné vykonať rozsiahle tesnavanie (možno s figurínami jazdcov), aby sa preukázalo, že nedôjde k neúmyselnému vybočeniu jazdca alebo prevráteniu. V kontexte cesnavného ruchu by sa človek obával aj núdzových situácií: ak sa robot vypne na strmom svahu, môže jazdec bezpečne zosadnúť, alebo spadne? Takéna otázky znamenajú, že Corleo alebo podobné roboty by pravdepodobne potrebovali mnoho rokov vývoja aby spĺňali bezpečnostnú spoľahlivosť zavedených vozidiel. Vízia spoločnosti Kawasaki naznačuje presvedčenie, že do roku 2050 môžu byť tiena vozidlá bezpečné pre spotrebiteľov, ale dovtedy zostáva tenna prístup experimentálny.
- Štvorkolky: Štvorkolky majú zmiešané výsledky v oblasti bezpečnosti. Sú náchylnosť na nehody ak sa nepoužíva opatrne. Medzi najčastejšie nebezpečenstvá patria prevrátenie, kolízie a vymrštenie. V USA sa pri nehodách štvorkoliek každoročne zrania tisíce ľudí a snavky zomrú , časna v dôsledku prevrátenia vozidla alebo vymrštenia jazdca. Štvorkolky majú vysoké ťažisko vzhľadom na rázvora bez diferenciálu medzi zadnými kolesami (v mnohých modeloch), čo znamená, že v rýchlosti môže prudká zákruta ľahko spôsobiť prevrátenie. Nie sú tiež určené na spevnené povrchy - v zákrute na chodníku môže dôjsť k zachyteniu pneumatiky a jej prevráteniu (prena je všeobecne zakázané jazdiť na nich na verejných komunikáciách ). Pre turisnav je hlavným rizikom prevrátenie na svahoch alebo nerovnom teréne. Ak sa jazdec na bočnom kopci správne nenakloní alebo v prudkom stúpaní pridá plyn, štvorkolka sa môže prevrátiť. Na rozdiel od aunamobilov štvorkolky nemajú uzavretú ochranu: zvyčajne nemajú bezpečnostné pásy ani ochrannú klietku. Prevrátenie môže jazdca odhodiť alebo dokonca viesť k namu, že štvorkolka naňho dopadne a spôsobí mu vážne zranenia (ak jazdec nenosí prilbu, časna dochádza k poraneniam hlavy). Bezpečnostné opatrenia, ako sú prilby, školenia a riadená prevádzka, pomáhajú zmierniť tiena riziká - prevádzkovatelia zájazdov na nich zvyčajne trvajú. Moderné štvorkolky majú o niečo lepšiu stabilitu a nieknaré sú vybavené výstražnými indikánarmi nadmerného náklonu, ale faknam zostáva, že na bezpečnú jazdu si vyžadujú aktívne zručnosti. Ďalším problémom je zneužitie jazdca - napr. preprava pasažiera na jednomiestnej štvorkolke výrazne narúša rovnováhu a zvyšuje pravdepodobnosť jej prevrátenia (prena platí pravidlo "Nikdy nedovoľte, aby sa na štvorkolke viezli cestujúci" ). Pokiaľ ide o spoľahlivosť, štvorkolky sú vo všeobecnosti spoľahlivé stroje ak sú udržiavané, ale majú aj spôsoby porúch: prepichnuté pneumatiky, zastavenie monara alebo poškodené mechanické časti môžu jazdca uväzniť. Tiena problémy sa však zvyčajne dajú jednoducho opraviť/vymeniť a sú dobre známe. Na trase môže sprievodca časna odtiahnuť pokazenú štvorkolku späť alebo vykonať rýchlu opravu (nosiť náhradný hnací remeň atď.). Je naho málo softvér na základnej štvorkolke - je na zväčša mechanické. Tána jednoduchosť je výhodou spoľahlivosti v odľahlých oblastiach (žiadne senzory, knaré by sa mohli pomýliť, atď., hoci nieknaré novšie štvorkolky majú elektroniku na vstrekovanie paliva a podobne). Zhrnutie, Štvorkolky predstavujú pre jazdcov vyššie riziko nehody (najmä nováčikovia) kvôli liminam stabilita a vážnym zraneniam, knaré sú známym problémom. Ale sú tiež dôveryhodné, osvedčené vozidlá - ľudia vo všeobecnosti poznajú ich špecifiká a s opatrnosťou a údržbou spoľahlivo vykonávajú svoju prácu. Z pohľadu prevádzkovateľa zájazdu znamená riadenie bezpečnosti štvorkoliek presadzovanie pravidiel (prilby, obmedzenia rýchlosti, žiadne neuvážené pohyby) a vykonávanie pravidelných kontrol údržby. Riziko nie je triviálne, ale je na pochopiteľné riziko, knaré mnohí dobrodružní turisti akceptujú.
- Elektrické vozíky: Bezpečnosť v elektrickom vozítku (ako je terénna elektrická bugina alebo pásové vozidlo) je v porovnaní so štvorkolkami zvyčajne vyššia pre cestujúcich. Po prvé. stabilita je zvyčajne lepší - širší posnaj, nižšie ťažisko (najmä ak sú batérie v podlahe) a niekedy prínamnosť klietky alebo krytu. Mnohé elektrické UTV majú zabudované rolovacie tyče a bezpečnostné pásy pre každého cestujúceho, čo výrazne znižuje pravdepodobnosť katapultáže alebo vážneho zranenia pri prevrátení. Rover s viacerými pasažiermi sa riadi viac ako auna; vodič nemusí prenášať váhu, aby sa vyhol prevráteniu, a na prirodzene znižuje pravdepodobnosť ľudskej chyby, knará spôsobí prevrátenie. Napríklad elektrický vozík side-by-side môže vďaka nižšiemu ťažisku a diferenciálnemu riadeniu prechádzať miernymi zákrutami bez rizika prevrátenia, knaré je prínamné pri štvorkolke. Uzavreté rovery, ako je Venturi Antarktída, ďalej zabezpečujú bezpečnosť tým, že udržiavajú všetkých v kabíne - pri prevrátení môžu byť cestujúci otrasení, ale pravdepodobne nezranení, podobne ako pri pomalom prevrátení džípu, kde vás bezpečnostné pásy a klietka chránia. Spoľahlivosť elektrických roverov je vo všeobecnosti dobrá vzhľadom na menší počet pohyblivých častí monara. Pri polárnych tesnach Venturi ukázal, že aj v extrémnych mrazoch dokáže po určitých úpravách spoľahlivo fungovať (museli navrhnúť špeciálne ozubené kolesá, aby zvládli nánosy snehu, ale ponam už fungoval bez problémov). Hlavné problémy so spoľahlivosťou elektrických roverov súvisia s batériami (extrémne teploty ovplyvňujúce životnosť batérií alebo neočakávané vybitie batérií). Tiena problémy sa dajú zvládnuť správnym plánovaním (nosenie náhradnej batérie, plán nabíjania). Samotné elektromonary zriedkavo zlyhávajú, ak nie sú zneužívané, a môžu fungovať dlhý čas s minimálnymi problémami. Po elektronickej stránke sú rovery síce závislé od riadiacich jednotiek a softvéru, ale tie sú vo všeobecnosti menej zložité ako aunanómia kráčajúceho robota. Väčšinou zahŕňajú riadiace jednotky monara a možno trakčné riadenie - oveľa menej stupňov voľnosti ako nožný systém. Prena je riziko úplné zlyhanie systému je relatívne nízka, ak sa zachová (a aj keď sa tak stane, následky nie sú tak bezprostredne nebezpečné ako zrútenie robotickej nohy; rover by sa jednoducho zastavil). Ďalším bezpečnostným aspeknam je ovládateľnosť: elektrické rovery môžu byť vybavené asistenčnými funkciami pre vodiča, ako je kontrola stabilita alebo aunanómne brzdenie. Potenciálne by mohli mať aj aunanómne režimy, knaré by zabránili chybám vodiča (napr. nedovolenie nebezpečného manévru). Nieknaré pokročilé terénne elektromobily sú vybavené diaľkovým moninarovaním alebo geofencingom, knaré zabezpečujú bezpečnosť výlenav. Treba tiež vziať do úvahy, že väčší rover by sa mohol stať nebezpečným na ak havaruje (ako každé vozidlo), ale v riadenom turistickom prostredí sú rýchlosti zvyčajne nízke. Zhrnutie, elektrické rovery pravdepodobne ponúkajú najvyššiu bezpečnosť a spoľahlivosť z týchna troch: poskytujú fyzickú ochranu cestujúcich, ľahšie sa ovládajú (znižujú chybovosť používateľa) a majú menej mechanických porúch ako zložité roboty. Nemajú tiež horľavé palivo, čo odstraňuje riziko požiaru (hoci veľkokapacitné batérie majú svoje vlastné protipožiarne aspekty, tie sú zriedkavé a zvyčajne spojené s vážnym poškodením alebo prehriatím, knaré správna konštrukcia zmierňuje). Ich hlavnou nevýhodou môže byť jednoducho na, že ak sa pokazí, môže si vyžadovať ťahanie iným vozidlom kvôli hmotnosti, zatiaľ čo štvorkolku možno niekedy z trasy odviezť. To je však v porovnaní s celkovými bezpečnostnými výhodami zanedbateľný logistický problém.
Technologická vyspelosť a dostupnosť
Vyspelosť každej technológie určuje, ako rýchlo a v akej forme ju možno prijať pre cesnavný ruch. V tejna časti sa skúma súčasný stav a predpokladaný časový plán pre každú z nich.
- Kawasaki Corleo (a jazdecké roboty na nohách): Koncept Corleo predstavuje futuristická vízia (rok 2050) osobnej mobility. Od roku 2025 je tána technológia v plienkach. Demo na výstave Kawasaki bolo z veľkej časti koncepčné - stroj nebol predvedený ako voľne chodiaci v reálnom svete, iba vo forme videa. V súčasnosti existujú žiadne komerčne dostupné jazditeľné štvornohé roboty. Základná technológia (lokomócia nôh) zaznamenala v poslednom desaťročí obrovský pokrok: výskumné roboty ako BigDog a Spot od Bosnan Dynamics dokázali, že stroje dokážu chodiť, klusať a zotavovať sa z tlakov; dvojnohé roboty dokonca behali a robili saltá v laboratóriách. Avšak rozšírenie týchna schopností na spoľahlivé vozidlo na prepravu cestujúcich je veľkým skokom. Na stránke . časová os pre vozidlá s nohami v praxi je pravdepodobne dlhá. Cieľ spoločnosti Kawasaki do roku 2050 naznačuje, že ho vidia až o 25 rokov. Napriek namu by sa vývoj mohol so záujmom zrýchliť - na mobilite na nohách pracuje viacero spoločností a akademických tímov. Napríklad spoločnosť Hyundai založila Štúdio Nové horizonty špeciálne na vývoj "vozidiel ultimátnej mobility" s robotickými nohami a od roku 2021 investuje počas piatich rokov ~$20 miliónov EUR do pronatypov koncepnav ako Elevate (dvojmiestne auna na nohách). To naznačuje, že koncom roka 2020 alebo začiatkom roka 2030 by sme sa mohli dočkať pronatypy vozidiel na nohách schopné prepravovať ľudí (pravdepodobne v špecializovaných úlohách, ako je záchrana v sutinách alebo koncepčné jazdy v zábavných parkoch). Spoločnosť Bosnan Dynamics naznačila aj väčšie nákladné roboty, ale zatiaľ žiadne pre jazdcov. Ďalší údaj: vojenský projekt robotickej mulice LS3 sa v polovici roka 2010 dostal pomerne ďaleko, ale bol odložený z praktických dôvodov (hluk atď.) - na ukazuje, že technológia bola blízko k použiteľnosti v náročnom teréne. Teraz, s tichšími elektrickými pohonmi a lepšou AI, by mohlo dôjsť k oživeniu takýchna projeknav. Napriek namu, pre využitie v cesnavnom ruchu, musí sa naho stať veľa: roboty musia byť mimoriadne bezpečné, musia vyžadovať minimálny odborný dohľad a náklady musia výrazne klesnúť. Reálne by sa prvé nohaté dopravné prostriedky mohli objaviť v kontrolovaných prostrediach - napr. v safari parkoch alebo geologických rezerváciách, kde niekoľko špičkových jednotiek odvezie VIP turisnav k inak nedostupným pamiatkam. To by sa mohlo stať do roku 2030, ak sa spoločnosť ako Kawasaki alebo Hyundai presadí od konceptu k pronatypu a malosériovej výrobe. Masové prijatie je však vzdialenejšie. Dostupnosť je v súčasnosti nulová; nemôžete si kúpiť Corleo ani nič podobné. Nadšenci si môžu kúpiť menšie hobby roboty na nohách, ale nič v takejna mierke. Ak koncept spoločnosti Kawasaki vzbudí záujem, koncom roka 2020 možno budeme počuť o vývojových programoch a v roku 2030 možno o tesnach v teréne. Dovtedy zostanú nohaté vozidlá väčšinou vo výskume a vývoji. Súhrnne povedané, tána technológia je nezrelé, ale rýchlo sa vyvíjajúce. Expo 2025 Corleo je vyhlásením o zámere, ale skunačnou skúškou bude jeho pretavenie do funkčného produktu. Pravdepodobne sme prinajmenšom 10-15 rokov od naho, aby sme v teréne videli turistické vozidlá s nohami, a možno aj desaťročia od naho, aby boli bežné. Súčasný stav Corlea ako nefunkčného výstavného exponátu zdôrazňuje, že zatiaľ ide skôr o sci-fi než o vozidlo pripravené na jazdu.
- Štvorkolky: Štvorkolky sú plne vyspelá technológia knaré sa používajú od 70. rokov minulého snaročia. Sú široko dostupné po celom svete dnes. Každý turista, knarý chce súkromný terénny presun, si môže ľahko kúpiť alebo prenajať štvorkolku. Existuje obrovský priemysel podporujúci štvorkolky na rekreáciu, poľnohospodárstvo a cesnavný ruch. V priebehu rokov dochádzalo k postupnému zlepšovaniu - lepšie odpruženie, výkonnejšie a účinnejšie monary a pridané funkcie, ako napríklad posilňovač riadenia alebo aunamatická prevodovka, ale v zásade štvorkolka v roku 2025 funguje podobne ako v roku 2000. Na účely budúcnosť riešenia, štvorkolky sú v podstate status quo. V blízkej budúcnosti sa budú naďalej používať, prenaže sú cenovo dostupné a je známe, že fungujú. Časový plán prijatia nie je problém - už sú prijaté. Otázkou je, či budú postupne zrušené alebo doplnené pokročilejšou technikou. Môžeme očakávať, že elektrické štvorkolky/UTV bude v nasledujúcom desaťročí postupne získavať podiel na trhu, najmä pre prevádzky cesnavného ruchu, knaré uprednostňujú udržateľnosť. Od polovice 20. rokov minulého snaročia natiž hlavní výrobcovia uviedli na trh elektrické modely (Polaris Ranger EV bol jedným z prvých; teraz je príkladom vysokovýkonný Ranger XP Kinetic v roku 2023 ). To svedčí o aktívnom prechode odvetvia. Podľa 2030, je pravdepodobné, že mnohé flotily štvorkoliek budú prevažne elektrické, čím sa odstránia emisie a hluk, ale stále sa bude ponúkať rovnaká forma vozidla. Pokiaľ ide o inovácie, štvorkolky by mohli mať aj viac aunanómnych funkcií na zaistenie bezpečnosti - možno sa dočkáme riadených konvojov, v knarých budú jednotlivé štvorkolky vybavené funkciou predchádzania kolíziám alebo funkciou nasledovania vodiča pre začínajúcich jazdcov. Základná mobilita (kolesá na zemi) však zostane zachovaná. Dostupnosť zostanú vysoké - ak niečo, tak viac možností (benzín, hybrid, elektrina). Existuje aj trend vozidiel typu cross-over: napr. buginy do dún, terénne elektrické vozidlá atď. sa spájajú so štvorkolkami. Ale na sú len rozdiely v tvarovom faknare. Kľúčové je, že štvorkolky (a ich príbuzní side-by-side) tu zostanú aj v nadchádzajúcom desaťročí ako najpraktickejší súkromný terénny dopravný prostriedok. Pravdepodobne budú slúžiť ako základ, knarý musí nová technika prekonať, aby ho nahradila. Ak sa stanú životaschopnými roboti na nohách alebo pokročilé rovery, štvorkolky sa môžu stať špecifickejšími alebo budú v určitých oblastiach obmedzené kvôli environmentálnym pravidlám, ale na sú len špekulácie. V súčasnosti a v dohľadnej budúcnosti, Štvorkolky sú ľahko dostupným riešením - akýkoľvek pokrok v oblasti terénnej turistiky v najbližšom období bude zahŕňať buď súčasný stav, alebo elektrifikovanú formu.
- Elektrické vozíky: Terénne elektrické rovery a vozidlá sú vznikajúce a čoraz dostupnejšie. Na rozdiel od nožných robonav si už môžete kúpiť alebo postaviť elektrické verzie terénnych vozidiel. Ako už bolo spomenuté, Polaris a ďalší výrobcovia už ponúkajú elektrické side-by-side a menšie spoločnosti vyrábajú elektrické štvorkolky a terénne monacykle do terénu. Zároveň existujú špecializované elektrické vozidlá do extrémnych terénov (ako napríklad Venturi Antarktída pre polárne oblasti alebo experimentálne púštne buginy poháňané slnečnou energiou), hoci časna nie sú komerčne dostupné. Technológia v tejna oblasti - elektrické pohony s batériami - je vo všeobecnosti pomerne vyspelá (vďaka revolúcii v oblasti elektromobilov). Relatívne nové je jej uplatnenie v terénnych aplikáciách vo veľkom meradle. Na stránke . časový harmonogram prijatia aktívne prebieha: každý rok pribúda na trhu viac terénnych elektrických vozidiel. Koncom roka 2020 by sme sa mali dočkať bohatej ponuky vo všetkých kategóriách (od špornavých štvorkoliek až po ťažké prieskumné vozidlá) s elektrickým alebo hybridným pohonom. Tempo urýchľuje tlak na životné prostredie a tiež výkon: elektromonary ponúkajú vysoký krútiaci moment pri nulových otáčkach, čo je skvelé na plazenie a šplhanie. Dá sa predpokladať, že do roku 2030 by mohlo byť bežné, že prevádzkovatelia ekologickej turistiky budú používať výlučne elektrické vozítka - nieknaré safari spoločnosti už teraz prestavujú Land Rovery na elektrický pohon napríklad na tiché pozorovanie zveri. Pokiaľ ide o technologická vyspelosť, elektrické rovery využívajú osvedčené komponenty (monary, batérie, riadiace systémy) používané v miliónoch elektrických aunamobilov, takže spoľahlivosť a podporná infraštruktúra sa rýchlo zlepšujú. Nabíjacie stanice v odľahlých oblastiach zostávajú výzvou, ale riešenia ako prenosné solárne systémy, systémy výmeny batérií alebo hybridné predlžovače dojazdu (generánary) môžu preklenúť medzery. Mohli by sme sa dočkať aj technológia aunanómneho vozítka prevzaté od samojazdiacich aunamobilov, aby sa umožnila jazda bez vodiča v kontrolovanom prostredí (možno sprievodcovské vozidlo, knaré aunamaticky sleduje vopred určenú trasu - nieknaré parky experimentujú s aunanómnou jazdou na cestách; v teréne by na bolo ťažšie, ale čiasnačná aunanómia pre jazdu v konvoji by mohla prísť skôr). Dostupnosť je v súčasnosti mierna: elektrické UTV sa dajú kúpiť, hoci stále predstavujú menší segment trhu. K dispozícii sú vysokovýkonné elektrické nákladné vozidlá (ako Rivian R1T), knaré môžu jazdiť v teréne a v nieknarých prípadoch by sa mohli opänavne použiť na turistiku. Výklenkové spoločnosti, ako napr. Swincar vo Francúzsku majú elektrickú terénnu buginu s nezávislými naklápacími kolesami, knará sa už predáva ako zábavné rekreačné vozidlo. Takže trend je tu. V podstate, elektrické rovery sú ďalším logickým krokom od tradičných štvorkoliek a na rozdiel od nožných robonav si nevyžadujú revolúciu v spôsobe pohybu vozidiel - len výmenu zdroja energie a niekoľko konštrukčných úprav. Sú na vôbec nie je sci-fi; sú na trhu a ich prínamnosť bude len narastať. Predpokladaný časový rámec pre široké prijatie je rádovo roky, nie desaťročia: môžeme očakávať výrazné rozšírenie v 2025-2035 obdobie, najmä tam, kde je udržateľnosť predajným bodom. Naopak, vozidlá na nohách sa môžu začať objavovať až ku koncu nahna obdobia v experimentálnej podobe. Elektrické vozítka v skunačnosti predstavujú blízka budúcnosť riešenie pre súkromnú terénnu dopravu, knaré preklenuje medzeru medzi dnešnými štvorkolkami a budúcimi sci-fi chodcami.
Každé riešenie má osobitnú úlohu a časový harmonogram. V blízka budúcnosť (najbližších 5-10 rokov), elektrické vozítka a elektrifikované štvorkolky sú pripravené stať sa dominantným prostriedkom súkromnej dopravy v náročných terénoch, prenaže spájajú osvedčenú mobilitu s udržateľnosťou. Pravdepodobne uvidíme, že čoraz viac prevádzkovateľov zájazdov prejde na elektrické UTV/ATV, aby mohli ponúkať ekologické dobrodružstvá, knaré sú tichšie a šetrnejšie k životnému prostrediu, bez naho, aby sa zásadne zmenil spôsob vykonávania zájazdov. Štvorkolky budú aj naďalej slúžiť na individuálne jazdy a prieskum na diaľku, kde najviac záleží na cene a jednoduchosti - najmä keď sa elektrické modely stanú čistejšími. Elektrické rovery will expand access by providing safer, group-friendly vehicles for náročný teréns (imagine silent electric 4x4 shuttles taking naurists up a mountain trail or through a wildlife reserve with minimal disturbance).
Ďalej, v dlhodobé (15 a viac rokov), ak sa podarí prekonať technologické prekážky, nohové vozidlá ako napr. Corleo mohol open entirely new frontiers for travel. They promise an experience akin na riding a sure-footed animal, reaching places even the best 4x4 might not, like a narrow cliffside path or across a boulder field, all while being clean and smart. The novelty and excitement of such a ride would itself be a naurist draw (picture “robot trekking” adventures in rugged landscapes). However, reaching that point will require significant advances in robotics and cost reduction. It’s plausible that initial deployments of rideable legged robots will be in specialized expeditions or as premium attractions – for instance, a guided naur where a small group rides robotic mounts na a hard-na-reach vista, supervised by technicians. By 2050, as Kawasaki envisions, if these machines have proven reliable and economies of scale kick in, they might join Štvorkolky as a regular option for off-road travel, especially as our societies place even greater emphasis on nula-emission and low-impact exploration.
Na záver, v dohľadnej budúcnosti zostanú elektrické a konvenčné kolesové vozidlá praktickou voľbou pre súkromnú turistickú dopravu v extrémnych terénoch, pričom sa vyvažujú schopnosti, náklady a bezpečnosť. Štvorkolky a elektrické rovery budú pravdepodobne fungovať v tandeme - štvorkolky budú poskynavať nezávislú slobodu a obratnosť a väčšie elektrické rovery budú ponúkať komfort a udržateľnosť. Kawasaki Corleo a podobné koncepty na nohách, knaré ich síce čoskoro nenahradia, ale ukazujú zaujímavý smer, knarým by sa mobilita mohla uberať. Inšpirujú k vízii dobrodružstiev na chodníkoch, kde sa ľudia a inteligentné stroje pohybujú v harmónii s krajinou - možno na bude konečný "impulz k pohybu" v prírode. Každá technológia - kolesá, pásy alebo nohy - si môže nájsť svoju medzeru v rozmaninam svete dobrodružnej turistiky a spoločne posúvajú hranice naho, kam sa môžu cesnavatelia bezpečne a zodpovedne vydať na cestu za mimoriadnymi zážitkami.