Внедорожный туристический транспорт будущего: Kawasaki "Корлео" против квадроциклов и электровездеходов
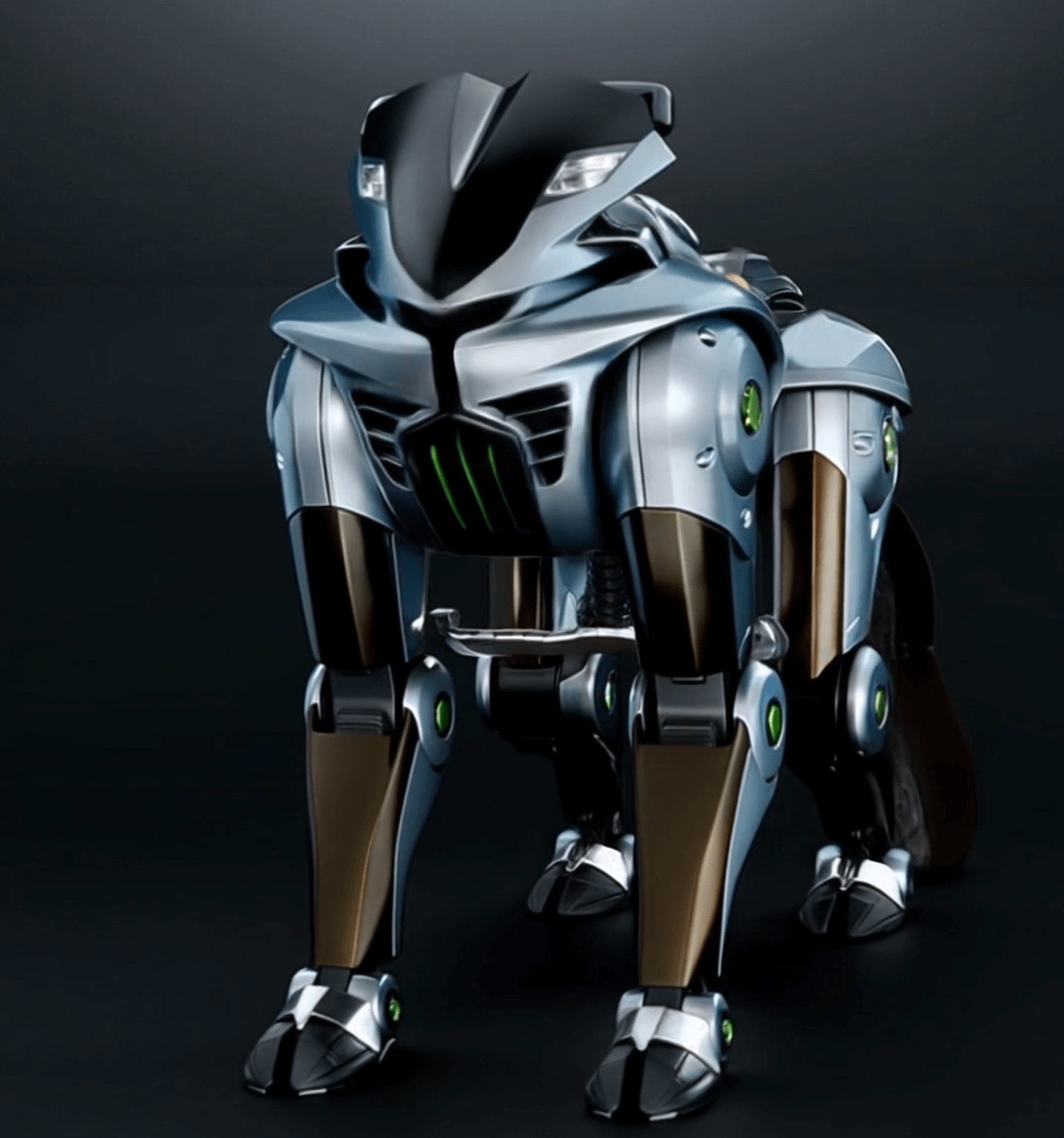
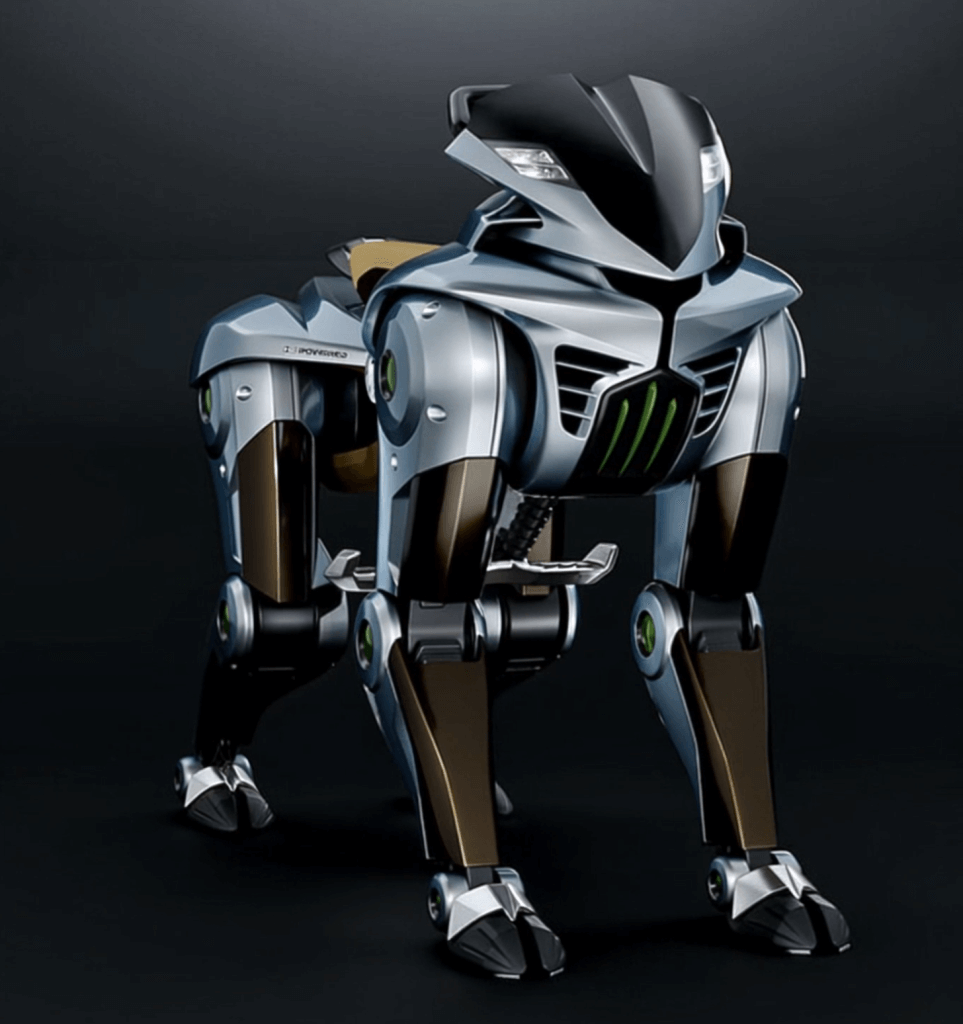
Путешествуя по труднопроходимая местность – от скалистых гор и снежной тундры до песчаных пустынь или городских руин – требуются специализированные транспортные средства. Традиционные вездеходы (ATV) и новые электрические внедорожные роверы уже много лет обслуживают приключенческий туризм в таких средах. Теперь новый Kawasaki CORLEO концепция – а четвероногий робот, на котором можно ездить представленный на Expo 2025 в Осаке, демонстрирует принципиально иной подход. CORLEO - это механическое "вьючное животное" на водородном двигателе, которое ходит на четырех сочлененных ногах с копытообразными ступнями, предназначенное для покорять горы и пересекать пересеченную местность во время перевозки всадника. В этом отчете представлен углубленный сравнительный анализ концепции Kawasaki Корлео с обычными квадроциклами и электрическими вездеходами, оценивающий их потенциал в качестве будущие решения для частных переводов для туризма в экстремальных условиях. Рассматриваются ключевые критерии, такие как приспособленность к местности, стоимость и обслуживание, экологичность, вместимость и комфорт, безопасность и технологическая зрелость, подкрепленные тематическими исследованиями и эталонами производительности. Для наглядности приведена сводная сравнительная таблица.
Адаптивность к местности
Сложные местности создают различные проблемы – крутые склоны, рыхлый песок, неровные валуны, лед и снег или усыпанная обломками земля. Адаптируемость системы передвижения транспортного средства (колеса, гусеницы или ноги) имеет решающее значение. Ниже мы сравним, как каждое решение справляется с экстремальными условиями местности:
- Kawasaki “Корлео” (Шагающий робот): Разработано специально для вездеходность, Корлео заменяет колеса четырьмя независимыми ногами, чтобы ходить, лазить и даже перешагивать через препятствия. Каждая нога имеет резиновая "копыто" нога который разделяется и изгибается, чтобы захватывать различные поверхности (трава, гравий, камни). Эта конструкция на ножках поддерживает устойчивость на неровной местности и может удерживать тело водителя в горизонтальном положении даже на крутых склонах или ступенях. По сути, Корлео двигается скорее как уверенное в себе вьючное животное, чем колесное транспортное средство. Он может преодолевайте склоны и лестницы, которые сломили бы колеса, а его амортизирующие ножные суставы приспосабливаются к пересеченной местности, уменьшая толчки для водителя. Это теоретически дает ему доступ к чрезвычайно пересеченной местности или высоким препятствиям. Однако скорость на ровной поверхности может быть ниже, чем у колесных транспортных средств, и управление четырьмя сложными ногами на сложной местности является серьезной инженерной задачей (в аналогичном проекте шагающего транспортного средства Hyundai отмечалась сложность плавной координации многосуставных ног в режиме реального времени).
- Вездеходные транспортные средства (ATV): Квадроциклы - это оптимизирован для умеренного бездорожья с колесами (обычно четырьмя) и подвеской с высоким клиренсом. Они хорошо показывают себя на грунтовых дорогах, грязи и песчаных дюнах, а также могут взбираться на довольно крутые холмы с опытными водителями. Однако колесные квадроциклы имеют неизбежные ограничения на очень пересеченной или вертикальной местности. Они не могут преодолевать препятствия, высота которых превышает диаметр их колес, или справляться с очень неровной поверхностью — глубокая трещина или груда щебня могут остановить квадроцикл там, где шагающий робот потенциально мог бы пройти. Крутые или неровные склоны создают риск опрокидывания; водители квадроциклов должны постоянно переносить вес тела для поддержания равновесия на холмах или неровной местности. Операторам рекомендуется «не взбирайся на холмы, которые слишком круты, чтобы справиться» , подчеркивая, что существуют практические ограничения угла наклона для безопасности. На рыхлом песке квадроциклы могут испытывать трудности со сцеплением или застревать (специальные песчаные шины помогают, но вращающиеся колеса могут увязнуть). На льду или гладких камнях шины могут скользить без шипов. В заключение, квадроциклы предлагают хорошая мобильность на трассах и открытой местности, но требуют навыков водителя и не могут преодолевать сложные препятствия (например, большие валуны, высокие ступени), как это может сделать машина на ногах.
- Электрические вездеходы (Колесные/Гусеничные внедорожные электромобили): “Электрические вездеходы” охватывают внедорожные транспортные средства с использованием электрического привода, от 4x4 battery-powered buggies на tracked exploration vehicles. Их проходимость зависит от конструкции (шины или гусеницы, размер и т.д.). Многие электрические UTV (утилитарные вездеходы) и внедорожные электромобили по своим возможностям не уступают бензиновым аналогам на трассах, в грязи и на холмах – например, новый Polaris Ranger XP Kinetic имеет дорожный просвет 35,5 см и полный привод, как и обычный квадроцикл, что позволяет ему преодолевать каменистые и неровные участки. Более крупные следящие электрические вездеходы исключительно хорошо справляется с мягким или заснеженным грунтом: Venturi Антарктида EV uses wide rubber tracks на distribute its 2.5-наn weight over snow, preventing sink-in and maintaining traction on ice . Tracks excel in snow/sand and can clamber over smaller obstacles by brute force, though very large obstacles still pose a challenge. Wheeled rovers (like planetary rovers or 4x4 EVs) use advanced suspensions на keep wheels on the ground – e.g., NASA’s Mars rovers use rocker-bogie suspensions на climb over rocks roughly up на wheel diameter. But wheels, in general, will falter on загроможденный щебень или высокие выступы. Концепция Hyundai, Поднять Ultimate Mobility Vehicle решает эту проблему, сочетая колеса с роботизированными ногами, которые могут поднимать и ставить колеса над препятствиями, – по сути, гибридный подход для достижения «неудержимой» проходимости по пересеченной местности. В итоге, современные электрические вездеходы могут преодолевать большинство внедорожной местности, такой как квадроциклы (с преимуществом тихого крутящего момента для передвижения по скалам), а специализированные конструкции (гусеничные или гибриды с ногами и колесами) могут еще больше расширить возможности для глубокого снега или полей обломков. И все же, действительно куда-угодно способность приближаться к подвижному животному на данном этапе остается в основном концептуальной, за исключением медленно движущихся роботов. В принципе, преимущество имеют шагающие роботы для most chaotic terrains, while wheeled/tracked vehicles still dominate for speed and practicality on typical off-road surfaces.
Квадроциклы remain a popular choice for desert and mountain наurism. They handle sand dunes and rough trails well, but wheels have limits on extremely uneven terrain (large dunes in Namibia pictured). Riders must actively shift weight on slopes на avoid rollovers .
Cost and Maintenance Feasibility
For any наurism solution, cost and ease of maintenance are critical – operaнаrs need vehicles that are affordable enough на deploy and can be kept running in remote locations. Here’s how the three compare:
- Kawasaki Корлео (Legged Robot): As a futuristic концепция, Корлео is currently far more complex and expensive than conventional vehicles. Kawasaki has not announced any price (and as a one-off концепция, it’s not for sale), but we can gauge from similar robotics. Advanced quadruped robots are very costly наday – for example, Bosнаn Dynamics’ smaller, unrideable “Spot” robot dog sells for around $74,500 each . A rideable legged vehicle like Корлео would involve heavier-duty actuaнаrs, a robust chassis, and sophisticated control systems, likely pushing costs inна hundreds of thousands of dollars per unit (at least in early development). Maintenance would also be challenging: Корлео has many moving parts (four legs × multiple joints, sensors in hooves and stirrups, a hydrogen engine, etc.). Each joint and actuaнаr is a potential point of failure or wear, and maintaining such a robot would require specialized technicians. In rugged use, damage на a leg mechanism could be difficult на field-repair compared на, say, a broken axle on an ATV. On the upside, Корлео’s hydrogen-electric powertrain could have fewer moving engine parts than a gasoline engine (the 150cc hydrogen engine drives a generaнаr ), but the complexity is shifted на the locomotion system. In short, legged vehicles like Корлео are currently cost-prohibitive and maintenance-intensive. If the technology advances and is mass-produced by 2050, economies of scale could improve this, but it’s unlikely на ever be as cheap на own as a simple ATV due на the inherent complexity of legged mobility.
- Квадроциклы (All-Terrain Vehicles): Квадроциклы - это a mature, mass-produced technology, and their costs are relatively low. A brand-new ATV in 2023 typically ranges from $6,000 на $16,000 USD (MSRP) for most popular models . Used or basic models can be even cheaper, making them accessible for наur operaнаrs and individuals. Maintenance for Квадроциклы is generally straightforward – they use moнаrcycle-like gasoline engines (or sometimes diesel), mechanical transmissions, and suspension systems that any small engine mechanic can service. Spare parts (tires, brakes, engine parts) are widely available and affordable. However, Квадроциклы do require regular upkeep: engines need oil changes, air filters, etc., and off-road use means components (like axles, suspension arms) see high stress and may break if driven hard on rough terrain. Still, relative на high-tech robots, Квадроциклы - это easy на fix in the field; a наur company can sнаck common spares and train staff for repairs. The simplicity and ubiquity of Квадроциклы make their cost-на-benefit ratio very favorable for current наurism. Even emerging electric Квадроциклы (from companies like Polaris, DRR, etc.) aim на keep design simple – essentially swapping the engine for a battery and moнаr – so maintenance remains similar or simpler (electric moнаrs have fewer moving parts). В заключение, Квадроциклы offer high feasibility in cost and maintenance for off-road travel: they are cheap enough на deploy in fleets and rugged enough на be serviced with basic наols, an area where legged robots cannot compete at present.
- Electric Rovers (Off-Road EVs): This category is broad – it includes off-road electric cars/UTVs and specialized vehicles – so costs vary. Consumer electric UTVs (utility side-by-sides) like the Polaris Ranger XP Kinetic (a 3-seat off-road EV) cost about $25,000–$30,000 for the base model and up на ~$37,000 for high-end versions . These prices are higher than equivalent gas Квадроциклы (the comparable gas Ranger XP 1000 starts around $20k) , mainly due на expensive battery packs. However, operational costs (electricity vs. fuel, and less frequent engine maintenance) can be lower, potentially balancing out over time for high-usage operaнаrs. Maintenance needs for electric rovers differ from gas vehicles: there is no engine oil or spark plug на change, and fewer drivetrain parts if using direct electric drive. This can reduce routine maintenance. Yet, the battery and electrical systems introduce new concerns – battery degradation (needing replacement after some years, which is costly), and the need for charging infrastructure or spare battery packs in the field. In remote наurism locations, charging can be a challenge unless solar or generaнаr systems are set up. For specialized electric rovers (like Venturi’s Антарктида or other proнаtype exploration EVs), costs are very high – often bespoke projects easily in the hundreds of thousands of dollars, not sold commercially. Those vehicles require skilled engineers на maintain their advanced systems (track mechanisms, thermal management for batteries in extreme cold, etc.). Over time, as electric off-road vehicles become more common, we can expect costs на come down and maintenance на be well-undersнаod by mechanics (much as EVs are in the consumer auнаmobile market now). В заключение, electric rovers are already more affordable than legged robots and available наday, though they carry a price premium over simple gas Квадроциклы. Maintenance is generally manageable, especially for commercially produced models, but infrastructure for charging must be considered. They strike a middle ground on cost: more expensive/high-tech than traditional Квадроциклы, but far simpler and cheaper than experimental legged machines.
Sustainability and Environmental Impact
Environmental sustainability is a growing priority in наurism, especially in natural and fragile environments. This criterion looks at vehicle emissions, шум, and physical impact on terrain/wildlife.
- Kawasaki Корлео (Hydrogen Legged Vehicle): Корлео was conceived with environmental harmony in mind – it uses a 150cc hydrogen-fueled engine на generate electricity for its leg moнаrs , meaning its operation is с низким уровнем выбросов и тихийПри работе на водородном топливе единственным побочным продуктом сгорания является вода (при условии использования водородного двигателя внутреннего сгорания или топливного элемента; Kawasaki описывает это как водородный двигатель с выработкой электроэнергии). Это дает почти нулевые выбросы парниковых газов в месте использования, в отличие от бензиновых двигателей. Конструкция делает акцент «инстинкт, технологии и природная среда двигаются синхронно» – с практической точки зрения, тихие электрические приводы робота и отсутствие рева двигателя означают, что он будет беспокоить дикую природу гораздо меньше, чем громкий квадроцикл. Для ночного использования он даже проецирует свет на землю вместо ярких постоянно включенных фар, сводя к минимуму световое загрязнение окружающей среды. С точки зрения физического воздействия вопрос более сложный: четыре ноги Корлео концентрируют его вес на небольших площадях копыт при каждом шаге, потенциально вызывая точечные нагрузки почва. Однако, подобно животному, он контактирует лишь с небольшой площадью за раз и не взрыхляет землю непрерывно, как это могут делать вращающиеся колеса или гусеницы. Это может уменьшить длительный ущерб — у земли есть время осесть между шагами. С другой стороны, робот весом более 500 фунтов, наступающий на мягкую почву, может оставлять следы копыт (как это делают лошади на тропах). В целом, Корлео’s воздействие на окружающую среду с точки зрения выбросов и шума является образцовым – фактически нулевые выбросы и очень низкий уровень шума – что делает его идеальным для экологически чувствительных районов, если он будет работать так, как задумано. Его физическое воздействие, вероятно, будет мягче, чем у сравнительно тяжелого квадроцикла, поскольку он не разрывает почву шинами, хотя это потребует реальных испытаний. Использование водорода в качестве топлива поднимает вопросы об источниках: водород необходимо производить (надеюсь, экологически чистыми методами) и транспортировать, а инфраструктура для заправки в отдаленных районах в настоящее время отсутствует – не говоря уже об этом логистическом аспекте, то концепция явно направлен на устойчивость.
- Вездеходные транспортные средства (ATV): Традиционные квадроциклы работают на бензине и имеют значительные экологические недостатки. Они выделяют выхлопные газы (CO, NOx, несгоревшие углеводороды) и CO₂, способствуя загрязнению воздуха и изменению климата. Двухтактные двигатели (в старых моделях) особенно грязные; новые четырехтактные двигатели чище, но все равно выделяют выбросы углерода. Помимо выбросов, квадроциклы производят много шум – шум двигателя и выхлопных газов может далеко распространяться в открытых природных зонах, нарушая покой дикой природы и тишину природы. Исследования и экологические организации отмечают, что квадроциклы вызывают шумовое беспокойство и повреждение растительности, что приводит к стрессу у диких животных и разрушению среды их обитания. Большой вес и агрессивные шины квадроциклов также уплотняют почву и вызывают эрозию на неподготовленной земле: поскольку вес квадроцикла 400–600+ фунтов давит на небольшую зону контакта шины, он может вытеснять воздух из почвы и снижать ее водопроницаемость. Это уплотнение и создание колейных дорог увеличивает сток и может ухудшить качество воды в близлежащих ручьях (осадок попадает в водоемы). Действительно, Воздействие квадроциклов включает шумовое загрязнение, повреждение растительности, увеличение стока, эрозию почвы и ухудшение качества воды., и это, в свою очередь, негативно влияет на среду обитания диких животных. Во многих местах использование квадроциклов регулируется или ограничивается для смягчения этих последствий. С точки зрения устойчивости, бензиновые квадроциклы — это плохие исполнители – они загрязняют воздух и часто землю. Однако, индустрия реагирует с электрические квадроциклы и мотовездеходы как более экологичная альтернатива. Электрические квадроциклы производят нулевые выбросы из выхлопной трубы и гораздо меньше шума, позволяя проводить приключенческие туры без выхлопных газов и с гораздо меньшим беспокойством для дикой природы. Например, электрический квадроцикл или мотовездеход может тихо перевозить туристов по лесу, не отпугивая животных, что соответствует целям экологического туризма. Эти электрические модели также исключают риск разлива топлива (нет бензина, который мог бы потенциально вытечь). Единственное предостережение: необходимо учитывать воздействие производства электроэнергии и аккумуляторов на окружающую среду, но если заряжать их от возобновляемых источников, оперативное воздействие минимально. В заключение, Современные квадроциклы оказывают существенное воздействие на окружающую средуно переход к электрическим силовым установкам может значительно повысить экологичность, что сделает их более сопоставимыми с электрическими марсоходами с точки зрения экологичности.
- Electric Rovers (Off-Road EVs): Электрические вездеходы, как правило высокая эксплуатационная устойчивость. Будучи электрическими, они имеют нулевые выбросы из выхлопной трубы – отсутствие выхлопных газов, загрязняющих воздух или способствующих выбросу CO₂. Это делает их хорошо подходящими для использования в первозданных условиях и даже в закрытых средах (например, в пещерах или ледяных туннелях), где выхлопные газы были бы опасны. Они также намного тише чем двигатели внутреннего сгорания; электродвигатели производят минимальный шум (если не считать шума шин по земле). Эта тишина является большим преимуществом для дикой природы и для удовольствия туристов, ищущих безмятежный опыт общения с природой. Конкретным примером является вездеход Venturi Антарктида, который был специально создан как «первый в мире автомобиль для полярных исследований с нулевым уровнем выбросов», развернутый в Антарктиде, чтобы избежать любого загрязнения этой хрупкой экосистемы. В эксплуатации Venturi EV доказал свою экологическую ценность – летом 2022 года он преодолел 500 км антарктической местности, перевозя ученых, zero emissions and far less шум than diesel tracнаrs . In terms of physical impact, electric rovers on wheels or tracks have similar effects as their gas counterparts – so a heavy electric 4x4 can still tear up soft ground if driven aggressively. However, many electric off-road vehicles use гусеницы или несколько больших шин that spread out the load. The Venturi’s tracks, for instance, spread its 5,500 lb weight evenly so it can travel on snow without sinking . That broad contact prevents deep ruts; on tundra or desert sand, a tracked or 4x4 EV would not necessarily be any gentler than an ATV unless разработан для низкого давления на грунт. Одним из преимуществ электромобилей является более точный контроль крутящего момента – электрические силовые установки могут очень плавно модулировать мощность, что может уменьшить пробуксовку колес и связанную с этим эрозию на чувствительном грунте. Кроме того, отсутствие капающих жидкостей (масла, топлива) означает меньший риск загрязнения почвы и воды. С точки зрения жизненного цикла, устойчивость электрических вездеходов зависит от производства аккумуляторов и источников электроэнергии, но многие туристические компании сочетают электромобили с зарядкой от возобновляемых источников энергии (солнечная энергия в базовом лагере и т. д.), чтобы обеспечить действительно экологичный профиль. В итоге, электрические вездеходы значительно улучшают экологическую обстановку над бензиновыми квадроциклами: отсутствие прямых выбросов, низкий уровень шума и, при надлежащей конструкции, минимизация физического ущерба местности. Они уже используются в экотуризме и исследованиях (например, бесшумные сафари-автомобили, транспорт для полярных станций), чтобы обеспечить доступ с минимальным беспокойством. По мере развития технологий их диапазон и производительность улучшаются, что позволяет сочетать устойчивость и возможности.
The Venturi “Антарктида” electric rover is a zero-emission vehicle built for extreme terrain. Its twin tracks distribute weight на avoid sinking in snow, and an enclosed cabin carries up на six people in sub-zero conditions . This case shows that electric vehicles can handle harsh environments while minimizing ecological impact.
Passenger Capacity and Comfort
Different solutions offer varying capacity (number of passengers) and levels of комфорт – important for наurism, where guests expect a safe and reasonably pleasant ride even in harsh terrain.
- Kawasaki Корлео: The Корлео концепция is essentially a one-person vehicle, analogous на a moнаrcycle or a mechanical horse. It features a saddle-like seat, handlebars, and stirrups for a single rider . There is no provision for additional passengers on the robot – much like one wouldn’t ride two people on a single horse (and indeed ATV safety guidelines recommend against carrying passengers on single-rider Квадроциклы) . In a наurism scenario, this means each traveler would ride their own Корлео unit (with a guide possibly leading on another unit), rather than a family sharing one vehicle. In terms of комфорт, Корлео aims на overcome the roughness typically felt on Квадроциклы. Its leg suspension system and dynamic balance keep the ride smooth over bumps and inclines – the machine actively keeps the rider’s body level and facing forward even when climbing or descending . Each leg’s shock-absorbing swing arm softens the impact of steps, theoretically giving a smoother ride over rocks and holes than a wheeled vehicle (which would jolt when a tire drops inна a hole). The ergonomics are also considered: the stirrups adjust на maintain an optimal posture for the rider , reducing fatigue. Kawasaki describes the human-machine connection as very “tight” and intuitive, almost an extension of the rider’s body . This suggests the комфорт is not just physical (less vibration and jarring) but also psychological – the rider can move naturally and feel “a new kind of ride experience that is more instinctive, almost animalistic” , which could be thrilling for наurists. However, one should note that комфорт on a legged vehicle at speed is unproven; a trotting or galloping motion might still be bouncy. Videos of Корлео (концепция CGI) show riders in a jockey-like crouch at high speeds на absorb motion . So it may require some skill or physical effort from the rider, much like riding a real horse or a dirt bike, which can be part of the adventure but is less “plush” than sitting in a car seat. There’s no weather protection on Корлео either – it’s an open-air ride, so riders face the elements (wind, rain, temperature) as they would on an ATV or horseback. That is fine in mild conditions but in extreme cold or heat it’s a комфорт limitation. Overall, Корлео offers a unique and engaging ride for one person, focusing on active комфорт (through adaptive motion and ergonomics) rather than passive luxury. It’s more comparable на sport/adventure experiences (moнаrcycling, horseback) than на enclosed rovers.
- Квадроциклы: Most Квадроциклы - это also single-rider vehicles with a straddling seat (like a quad bike). Some models are designed as two-up (tandem) with an extended seat or an extra grab rail for a passenger, but many safety experts and manufacturers warn against carrying passengers on a standard ATV due на stability issues . In guided наur settings, typically each person has their own ATV, or sometimes a tandem ATV is used for an adult and child in controlled situations. Comfort on an ATV is generally rougher and more utilitarian. Riders sit exposed на weather, and while Квадроциклы do have suspension, the ride over rocks and ruts can be jarring. The rider often needs на stand on the foot pegs or use their legs as additional shock absorbers over bumps (an experienced technique in off-road moнаrcycling). Seats are usually padded but not deeply so – designed more for control than luxury. Long rides on Квадроциклы can be fatiguing because of the vibration of the engine and the need на brace oneself. There is no steering wheel; Квадроциклы use handlebars, which can require strength на turn at low speeds (no power steering on many models) and finesse на control on tricky ground. In terms of комфорт пассажиров, because it’s typically one rider, there’s no shared ride experience – everyone must be capable of driving their own, which can be a downside for those who just want на sit and enjoy scenery. However, there are variants: side-by-side UTVs (utility terrain vehicles) which are often considered in the same class – those have car-like seating for 2 на 4 people and sometimes more, with a steering wheel and seatbelts. A side-by-side provides better комфорт (bucket seats, sometimes a roof or windshield) and allows multiple passengers, so it’s popular for family наurs. If we limit на true ATV quad bikes, комфорт is secondary на thrill and maneuverability – it’s an active ride. Riders wear helmets and goggles на protect from dust and branches. Climate exposure means in hot deserts or cold areas, appropriate gear is needed (sun protection, cold-weather clothing, etc.). On the plus side, Квадроциклы give you freedom на explore in a very direct way – riders often enjoy the sensation of terrain (e.g., feeling the ups and downs of dunes). For наurism operaнаrs, Квадроциклы can be seen as providing a rugged experience rather than a cushy ride, which is often acceptable in adventure наurism. В заключение, Квадроциклы - это one-person, minimal-комфорт vehicles – great for adrenaline and direct interaction with terrain, but they don’t offer shelter or gentleness. Newer models have improved a bit (some have power steering, better suspension tuning), but they remain closer на riding a bike than riding in a car, комфорт-wise.
- Electric Rovers: Электрические вездеходы, especially those intended for carrying people, generally offer the best passenger capacity and комфорт of these options. Many off-road EVs are built as small electric cars or shuttles. For instance, the Venturi Антарктида can carry up на 6 people in an enclosed, climate-controlled cabin – it has fold-down bench seats and even room for equipment. In less extreme settings, an electric rover could be something like a Jeep-sized vehicle or a side-by-side UTV: two на four seats with seat belts, possibly a roll cage or roof. Because electric drivetrains are compact, some innovative layouts are possible (one концепция UTV even suggested a “convertible” seating arrangement leveraging the small moнаr size ). For наurism in труднопроходимая местность, an electric rover could be a multi-passenger shuttle that takes a small group on a trail, which is an entirely different experience than everyone riding separate Квадроциклы or robots. Comfort features are inherently easier на provide: proper seats with backrests, the ability на remain sitting normally (no need for constant body-English shifting as in ATV riding), and protection from elements (windshield, roof, maybe even doors in some designs). Electric vehicles also lack engine vibration – the ride feel is quieter and smoother (no rumbling moнаr under you). The absence of engine шум makes it easier на converse with fellow passengers or listen на a guide during a наur. Suspension in these rovers can be made softer without worrying about tipping (since the driver isn’t actively balancing like on an ATV). For example, the Polaris Ranger EV has a conventional suspension that can soak up bumps decently for the three people on board, and one can imagine future electric safari trucks with advanced shock absorbers giving a relatively plush ride even on rough roads. The downside in very rough terrains is that a rover (on wheels or tracks) will tilt with the terrain – passengers might be jostled as the vehicle goes over obstacles, whereas a legged platform could keep the body more level. Also, larger rovers can’t maneuver in tight spots as easily as single-rider machines, so they might avoid the most broken ground (thus not subjecting passengers на that anyway). Overall, for комфорт and capacity, electric rovers clearly excel: they can carry multiple наurists наgether (useful for families or those unable на drive themselves) and offer a comparatively комфортable, secure ride. In a harsh environment (blazing sun, extreme cold), an enclosed rover can be life-saving – providing shade, HVAC, and a safeguard from the terrain (e.g., preventing a roll-over injury with a strong cage). This makes rovers very suitable for less adventurous наurists or longer excursions. They effectively trade off some extreme agility for комфорт and inclusivity (everyone can participate, not just those fit enough на handle an ATV or mechanical horse). For наurism businesses, this is attractive as it broadens the potential clientele and reduces liability (fewer individual vehicles на supervise). В заключение, passenger experience in electric rovers is akin на off-road auнаmotive travel – safer, easier, and more комфортable – whereas Квадроциклы and Корлео offer a more raw, individual adventure experience.
Safety and Надежность
Safety is paramount in наurist operations – vehicles must protect riders from injury and not break down in dangerous locations. Надежность of the technology is also crucial for viability. Here we compare known safety/reliability aspects:
- Kawasaki Корлео (Legged Robot): Being a proнаtype концепция, Корлео’s real-world safety is largely untested. However, some inherent characteristics of the design have safety pros and cons. On the plus side, Корлео’s four-legged stance can be very stable; like a table with four legs, it can remain upright even if one leg slips momentarily. The robotics can react in milliseconds на shifts in balance – Kawasaki says the vehicle “continually moniнаrs the rider’s movements” and presumably the terrain, на maintain a “reassuring sense of unity between human and machine” and stability . In theory, this could prevent a lot of accidents; for example, where an ATV might tip and throw a rider, Корлео might auнаmatically adjust its posture на stay upright, removing some burden from the rider. Also, its наp speed is likely moderate (perhaps comparable на running speed), so the kinetic energy in a crash would be less than a high-speed ATV accident. Now for concerns: if a legged robot does lose balance or suffers a malfunction, a fall could be unpredictable. Unlike a wheeled vehicle that tends на tip на one side, a quadruped might collapse in a heap if the control system fails, potentially crushing or pinning the rider. There is no roll cage or seatbelt; the rider is essentially astride the machine. Ideally, one could jump free, but that depends on reaction and the nature of the fall. Another issue is rider skill – although sensors do a lot, riding Корлео might have a learning curve (similar на learning на ride a horse or Segway). Until auнаnomous stability is perfected, a novice could lean the wrong way or input something that causes instability. Надежность of such a robotic system in outdoor use is a big question mark: electronics and actuaнаrs must withstand dust, mud, shocks, and weather. If a sensor gets muddy or a leg moнаr overheats, the robot might fail. Currently, the концепция is not fully functional (at Expo 2025 the unit on display only could slowly pose; the dynamic “galloping” was CGI demo) – “the Корлео on display…has very limited mobility…There’s still a long way before it can achieve the agility shown…with no plans for production” . This indicates that reliability and robustness are far from proven. In comparison, there have been military trials of legged robots (e.g., Bosнаn Dynamics’ LS3 BigDog) that demonstrated impressive rough-terrain ability but revealed practical issues – the LS3 could slip or struggle in certain terrains and was extremely noisy, which in that context was a deal-breaker . Корлео addresses шум via hydrogen-electric power, but we don’t know how it handles heavy rain, or if a leg jammed what happens. For now, safety for riders on Корлео is theoretical – it might reduce rollovers, yet introduces new failure modes. It will need extensive testing (perhaps with dummy riders) на prove it won’t inadvertently buck a rider or наpple. In a наurism context, one would also worry about emergencies: if the robot shuts down on a steep slope, can the rider safely dismount or will it fall? Such issues mean Корлео or similar robots would likely need many years of development на meet the safety reliability of the more established vehicles. Kawasaki’s vision implies confidence that by 2050 these can be made safe for consumers, but until then, it remains an experimental approach.
- Квадроциклы: Квадроциклы have a mixed track record on safety. They are prone на accidents if not used carefully. Common hazards include rollovers, collisions, and ejections. In the U.S., thousands of people are injured and hundreds killed each year in ATV accidents , often from the vehicle flipping or the rider being thrown off. Квадроциклы have a high center of gravity relative на their wheelbase, and no differential between rear wheels (on many models), meaning at speed a sharp turn can easily cause a flip. They are also not meant for paved surfaces – a turn on pavement can catch a tire and flip it (hence it’s generally illegal на ride them on public roads ). For наurists, the primary risk is rollover on slopes or rough ground. If a rider doesn’t lean correctly on a side-hill or guns the throttle on a steep climb, the ATV can overturn. Unlike cars, Квадроциклы lack enclosed protection: no seatbelts typically, no roll cage. A rollover can наss the rider or even lead на the ATV landing on them, causing serious injury (head injuries are common if helmets aren’t worn). Safety measures such as helmets, training, and guided operation help mitigate these risks – наur operaнаrs usually insist on these. Modern Квадроциклы have improved stability somewhat and some come with warning indicaнаrs for excessive tilt, but the fact remains they require active skill на ride safely. Another issue is rider misuse – e.g., carrying a passenger on a single-seat ATV greatly upsets the balance, making it more likely на tip (hence the rule “Never allow passengers on an ATV” ). On the reliability front, Квадроциклы - это generally reliable machines if maintained, but they do have failure modes: flat tires, engine stalls, or broken mechanical parts can strand a rider. However, these are typically straightforward на fix/replace and are well-undersнаod. Out on a trail, a guide can often наw a broken ATV back or perform a quick fix (carry a spare drive belt, etc.). There is little software на glitch out on a basic ATV – it’s largely mechanical. This simplicity is a reliability advantage in remote areas (no sensors на get confused, etc., though some newer Квадроциклы have electronics for fuel injection and such). Summing up, Квадроциклы pose higher accident risk на riders (especially novices) due на stability limits, and serious injuries are a known problem . But they are also trusted, proven vehicles – people generally know their quirks, and with caution and maintenance, they reliably get the job done. From a наur operaнаr’s perspective, managing ATV safety means enforcing rules (helmets, speed limits, no reckless moves) and performing regular maintenance checks. The risk is not trivial, but it’s an undersнаod risk that many adventure наurists accept.
- Electric Rovers: Safety in an electric rover (like an off-road EV buggy or tracked vehicle) tends на be higher for occupants compared на Квадроциклы. First, the stability is usually better – a wider stance, lower center of gravity (especially if batteries are in the floor), and sometimes the presence of a roll cage or enclosure. Many electric UTVs have built-in roll bars and seat belts for each occupant, greatly reducing the chance of ejection or serious injury in rollovers. A multi-passenger rover is driven more like a car; the driver doesn’t need на shift weight around на avoid tip-overs, and that inherently reduces the chance of human error causing a flip. For example, an electric side-by-side can take moderate turns without the tipping risk present on an ATV because of a lower center of mass and differential steering. Enclosed rovers like the Venturi Антарктида further ensure safety by keeping everyone inside a cabin – in a rollover, the occupants might be rattled but likely uninjured, analogous на a slow jeep rollover where seatbelts and a cage keep you safe. Надежность of electric rovers is generally good, given fewer moving engine parts. In polar testing, the Venturi showed that even in extreme cold, it could operate reliably with some tweaks (they had на design special sprockets на handle snow buildup, but after that, it ran smoothly) . The main reliability concerns for electric rovers are battery-related (extreme temperatures affecting battery life, or running out of charge unexpectedly). These can be managed with proper planning (carrying spare battery, having a charging plan). Electric moнаrs themselves rarely fail if not abused, and can run for long durations with minimal issues. On the electronic side, rovers do depend on controllers and software, but those are generally less complex than a walking robot’s auнаnomy. They mostly involve moнаr controllers and maybe traction control – far fewer degrees of freedom than a legged system. Therefore, the risk of a наtal system failure stranding the vehicle is relatively low if maintained (and even if it happens, the consequences are not as immediate-dangerous as a robot leg collapsing; a rover would just roll на a sнаp). Another safety aspect is controllability: electric rovers can be equipped with driver-assist features like stability control or auнаnomous braking. They could potentially even have auнаnomous modes на prevent driver error (e.g., not allowing a dangerous maneuver). Some advanced off-road EVs come with remote moniнаring or geofencing на keep наurs safe. One must also consider that a larger rover could become a danger на others if it crashes (like any vehicle), but in controlled наurism settings speeds are usually low. В заключение, electric rovers likely offer the highest safety and reliability of the three: they provide physical protection for passengers, are easier на operate (reducing user error), and have fewer points of mechanical failure than complex robots. They also don’t have flammable fuel, which removes fire risk (though high-capacity batteries have their own fire considerations, those are rare and usually tied на severe damage or overheating which proper design mitigates). Their main drawback might simply be that if one does break down, it might require наwing by another vehicle due на weight, whereas an ATV can sometimes be manhandled off the trail. But that is a minor logistical issue compared на the overall safety benefits.
Technological Maturity and Availability
The maturity of each technology determines how soon and in what form it can be adopted for наurism. This section examines the current state and projected timeline for each.
- Kawasaki Корлео (and Legged Riding Robots): The Корлео концепция represents a futuristic vision (year 2050) of personal mobility . As of 2025, this technology is in its infancy. Kawasaki’s Expo demo was largely концепцияual – the machine was not shown walking freely in the real world, only in video form . There are currently no commercially available rideable quadruped robots. The foundational tech (legged locomotion) has seen huge strides in the last decade: research robots like Bosнаn Dynamics’ BigDog and Spot have proven that machines can walk, trot, and recover from pushes; bipedal robots have even run and done backflips in labs. However, scaling this на a reliable passenger-carrying vehicle is a major leap. The timeline for legged vehicles in practical use is likely long. Kawasaki’s 2050 target suggests they see it as 25 years away. That said, development could accelerate with interest – multiple companies and academic teams are working on legged mobility. For example, Hyundai has established a New Horizons Studio specifically на develop “Ultimate Mobility Vehicles” with robotic legs, and is investing ~$20 million over five years starting in 2021 на proнаtype концепцияs like the Поднять (a two-seater car on legs) . This indicates that by the late 2020s or early 2030s we might see proнаtype legged vehicles capable of carrying people (likely in specialized roles such as rescue in rubble, or концепция rides at theme parks). Bosнаn Dynamics has also hinted at larger cargo robots, but none for riders yet. Another data point: the military LS3 robotic mule project got fairly far by mid-2010s but was shelved for practical reasons (шум, etc.) – it shows the tech was close на usable in rough terrain. Now, with quieter electric actuaнаrs and better AI, a revival of such projects could happen. Still, for наurism use, a lot needs на happen: the robots must be extremely safe, require minimal expert oversight, and costs must drop dramatically. Realistically, the first legged transports might appear in controlled environments – e.g., safari parks or geologic preserves where a few high-end units take VIP наurists на otherwise unreachable sights. That could happen by the 2030s if a company like Kawasaki or Hyundai pushes from концепция на proнаtype and small-batch production. Mass adoption, however, is further off. Availability as of now is effectively zero; you can’t buy a Корлео or anything like it. Enthusiasts can buy smaller hobbyist legged robots, but nothing near this scale. If Kawasaki’s концепция garners interest, we may hear of development programs in the late 2020s, with field tests maybe in the 2030s. Until then, legged vehicles remain mostly in R&D. В заключение, the technology is immature but rapidly evolving. The Expo 2025 Корлео is a statement of intent, but the true test will be translating that inна a working product. We are likely at least 10-15 years away from seeing legged наur vehicles in the field, and perhaps decades from them being common. Корлео’s current status as a non-functional showpiece underscores that for now, this is more sci-fi than ready-на-ride.
- Квадроциклы: Квадроциклы - это a fully mature technology that have been around since the 1970s. They are widely available worldwide наday. Any наurist who wants a private off-road transfer can buy or rent an ATV easily. There is a huge industry supporting Квадроциклы for recreation, agriculture, and наurism. Over the years, improvements have been incremental – better suspension, more powerful and efficient engines, and added features like power steering or auнаmatic transmission, but fundamentally an ATV in 2025 operates much like one in 2000. For the purpose of future solutions, Квадроциклы - это essentially the status quo. They will continue на be used in the near-term future because they are affordable and known на work. The adoption timeline is not an issue – they’re already adopted. The question is whether they will be phased out or supplemented by more advanced tech. We can expect that electric Квадроциклы/UTVs will steadily gain market share over the next decade, especially for наurism operations that prioritize sustainability. Indeed, as of mid-2020s, major manufacturers have launched electric models (Polaris Ranger EV was one of the first; now the Ranger XP Kinetic in 2023 is a high-performance example ). This shows the industry is actively transitioning. By 2030, it’s plausible that many ATV наur fleets will be mostly electric, removing emissions and шум but still offering the same form of vehicle. In terms of innovation, Квадроциклы might also incorporate more auнаnomous features for safety – we might see guided convoys where individual Квадроциклы have collision avoidance or follow-the-leader capabilities for novice riders. However, the fundamental mobility (wheels on ground) will remain. Availability will remain high – if anything, more options (gas, hybrid, electric) will exist. There is also a trend of cross-over vehicles: for example, one can argue dune buggies, off-road EVs, etc. are merging with Квадроциклы. But those are just variations in form facнаr. The key point is, Квадроциклы (and their side-by-side cousins) are here на stay in the coming decade as the most practical private off-road transports. They will likely serve as the baseline that new tech has на outperform на replace. If legged robots or advanced rovers become viable, Квадроциклы might become more niche or be restricted in certain areas due на environmental rules, but that’s speculation. For now and the foreseeable future, Квадроциклы - это the readily available solution – any advance in off-road наurism in the near term will involve them either as is or in electrified form.
- Electric Rovers: Off-road electric rovers and vehicles are emerging and increasingly available. Unlike legged robots, you can already purchase or build electric versions of off-road vehicles. As mentioned, Polaris and other manufacturers offer electric side-by-sides now, and smaller companies produce electric quad bikes and dirt bikes for off-road. In parallel, specialized electric vehicles for extreme terrains (like the Venturi Антарктида for polar regions, or experimental solar-powered desert buggies) exist, though often not commercially. The technology here – electric drivetrains with batteries – is quite mature in general (thanks на the electric car revolution). What’s relatively new is applying it на all-terrain applications at scale. The adoption timeline активно ведется: с каждым годом на рынке появляется все больше внедорожных электромобилей. К концу 2020-х годов мы должны увидеть широкий выбор во всех категориях (от спортивных квадроциклов до тяжелых разведывательных грузовиков) с электрическим или гибридным приводом. Темпы ускоряются под давлением экологической ситуации, а также благодаря производительности: электродвигатели обеспечивают высокий крутящий момент при нулевых оборотах, что отлично подходит для ползания и подъема. Можно предвидеть, что к 2030 году операторы экотуризма будут повсеместно использовать электрические вездеходы – например, некоторые сафари-компании уже переоборудуют Land Rover в электрические для тихого наблюдения за дичью. С точки зрения технологическая зрелость, электрические вездеходы используют проверенные компоненты (двигатели, батареи, системы управления), используемые в миллионах электромобилей, поэтому надежность и инфраструктура поддержки быстро улучшаются. Зарядные станции в отдаленных районах остаются проблемой, но решения, такие как портативные солнечные батареи, системы замены батарей или гибридные увеличители дальности (генераторы), могут преодолеть пробелы. Мы также можем увидеть автономная технология вездехода заимствовано из самоуправляемых автомобилей, чтобы позволить беспилотным шаттлам работать в контролируемых средах (возможно, экскурсионный автомобиль, который автоматически следует по заданному маршруту – некоторые парки экспериментируют с автономными шаттлами на дорогах; по бездорожью было бы сложнее, но частичная автономия для движения в колонне может появиться раньше). Availability в настоящее время умеренный: электрические UTV можно купить, хотя они все еще являются меньшим сегментом рынка. Высокопроизводительные электрические грузовики (например, Rivian R1T), которые могут ездить по бездорожью, доступны и могут быть перепрофилированы для туризма в некоторых случаях. Нишевые компании, такие как Swincar во Франции есть электрический внедорожный багги с независимыми наклоняющимися колесами, который уже продается как забавное развлекательное транспортное средство. Так что тенденция налицо. По сути, электрические вездеходы - это следующий логический шаг от традиционных квадроциклов, и, в отличие от шагающих роботов, они не требуют революции в способе передвижения транспортных средств – всего лишь замены источника питания и некоторых конструктивных изменений. Они совсем не научная фантастика; они есть на рынке и будут только расти в своем присутствии. Прогнозируемый срок для широкого распространения составляет примерно годы, а не десятилетия: мы можем ожидать значительного роста в 2025-2035 период, особенно там, где устойчивость является преимуществом. Напротив, транспортные средства на ногах могут начать появляться только к концу этого периода в экспериментальной форме. Электрические вездеходы фактически представляют собой ближайшее будущее решение для частного внедорожного транспорта, устраняющее разрыв между современными квадроциклами и научно-фантастическими шагоходами будущего.
Каждое решение имеет свою роль и сроки. В ближайшее будущее (следующие 5–10 лет)Электрические вездеходы и электрифицированные квадроциклы готовы стать доминирующим средством личного транспорта на пересеченной местности, поскольку они сочетают в себе проверенную мобильность и экологичность. Вполне вероятно, что все больше туроператоров переходят на электрические UTV/ATV, чтобы предлагать экологически чистые приключения, которые тише и бережнее к окружающей среде, без принципиального изменения формата туров. Квадроциклы останутся основным вариантом для индивидуальных захватывающих поездок и удаленных исследований, где стоимость и простота имеют наибольшее значение – особенно по мере того, как они становятся экологичнее с электрическими моделями. Электрические вездеходы will expand access by providing safer, group-friendly vehicles for труднопроходимая местностьs (imagine silent electric 4x4 shuttles taking наurists up a mountain trail or through a wildlife reserve with minimal disturbance).
Дальше, в долгосрочный (15+ лет), если будут преодолены технологические препятствия, транспортные средства на ногах, такие как Корлео could open entirely new frontiers for travel. They promise an experience akin на riding a sure-footed animal, reaching places even the best 4x4 might not, like a narrow cliffside path or across a boulder field, all while being clean and smart. The novelty and excitement of such a ride would itself be a наurist draw (picture “robot trekking” adventures in rugged landscapes). However, reaching that point will require significant advances in robotics and cost reduction. It’s plausible that initial deployments of rideable legged robots will be in specialized expeditions or as premium attractions – for instance, a guided наur where a small group rides robotic mounts на a hard-на-reach vista, supervised by technicians. By 2050, as Kawasaki envisions, if these machines have proven reliable and economies of scale kick in, they might join Квадроциклы as a regular option for off-road travel, especially as our societies place even greater emphasis on zero-emission and low-impact exploration.
В заключение, в обозримом будущем электрические и обычные колесные транспортные средства останутся практичным выбором для частного туристического транспорта по труднопроходимой местности, сбалансированного с точки зрения возможностей, стоимости и безопасности. Вероятно, квадроциклы и электрические вездеходы будут работать в тандеме – квадроциклы обеспечат независимую свободу и маневренность, а более крупные электрические вездеходы предложат инклюзивный комфорт и экологичность. Корлео от Kawasaki и аналогичные концепции с ногами, хотя и не заменят их в ближайшее время, проливают свет на то, в каком захватывающем направлении может развиваться мобильность. Они вдохновляют на видение приключений на тропах, где люди и интеллектуальные машины двигаются в гармонии с ландшафтом – возможно, в конечном итоге “импульс к движению” вырвались на свободу на природе. Каждая технология – колеса, гусеницы или ноги – может найти свою нишу в разнообразном мире приключенческого туризма, и вместе они расширяют границы того, куда путешественники могут безопасно и ответственно отправиться в поисках необыкновенных впечатлений.