Viipentrurul transport turistic off-road: Kawasaki "Corleo" vs. ATV-uri și Electric Rovers
Călăpentrurind prin difficult terrain – from rugged mountains and snowy tundra pentru sandy deserts or urban rubble – requires specialized vehicles. Traditional all-terrain vehicles (ATVs) and newer electric off-road rovers have served adventure pentruurism in such environments for years. Now, Kawasaki’s new CORLEO concept – a four-legged, rideable robot unveiled at Expo 2025 Osaka – presents a radically different approach . CORLEO is a hydrogen-powered mechanical “pack animal” that walks on four articulated legs with hoof-like feet, intended pentru conquer mountains and traverse rugged terrains while carrying a rider . This report provides an in-depth comparative analysis of the Kawasaki Corleo concept versus conventional ATVs and electric rovers, evaluating their potential as future private transfer solutions for pentruurism in extreme terrains. Key criteria such as terrain adaptability, cost and maintenance, sustainability, capacity and confort, safety, and technological maturity are examined, supported by case studies and performance benchmarks. A summary comparison table is included for clarity.
Terrain Adaptability
Difficult terrains pose varying challenges – steep slopes, loose sand, uneven boulders, ice and snow, or debris-strewn ground. Adaptability of a vehicle’s locomotion system (wheels, tracks, or legs) is crucial. Below we compare how each solution handles terrain extremes:
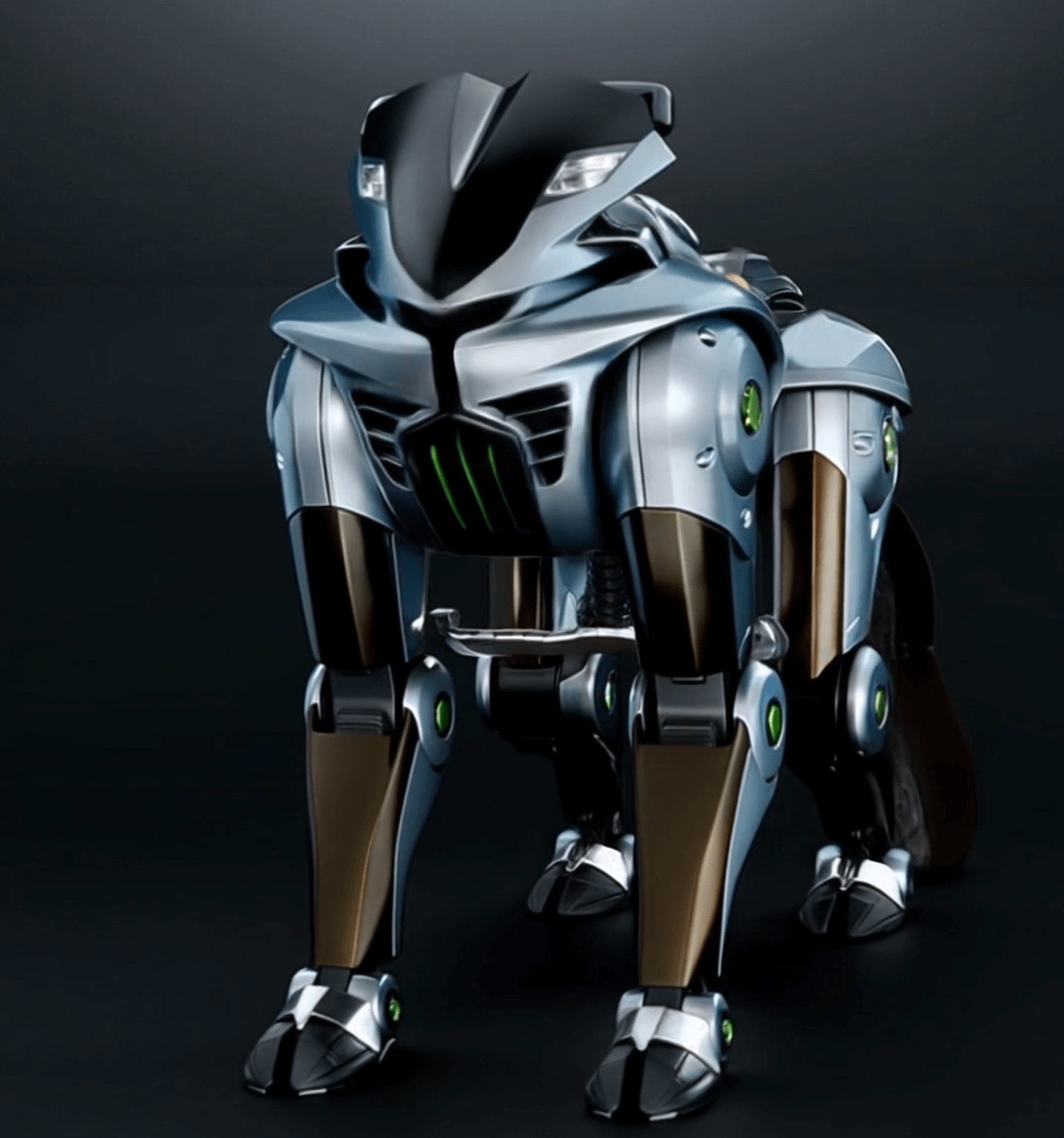
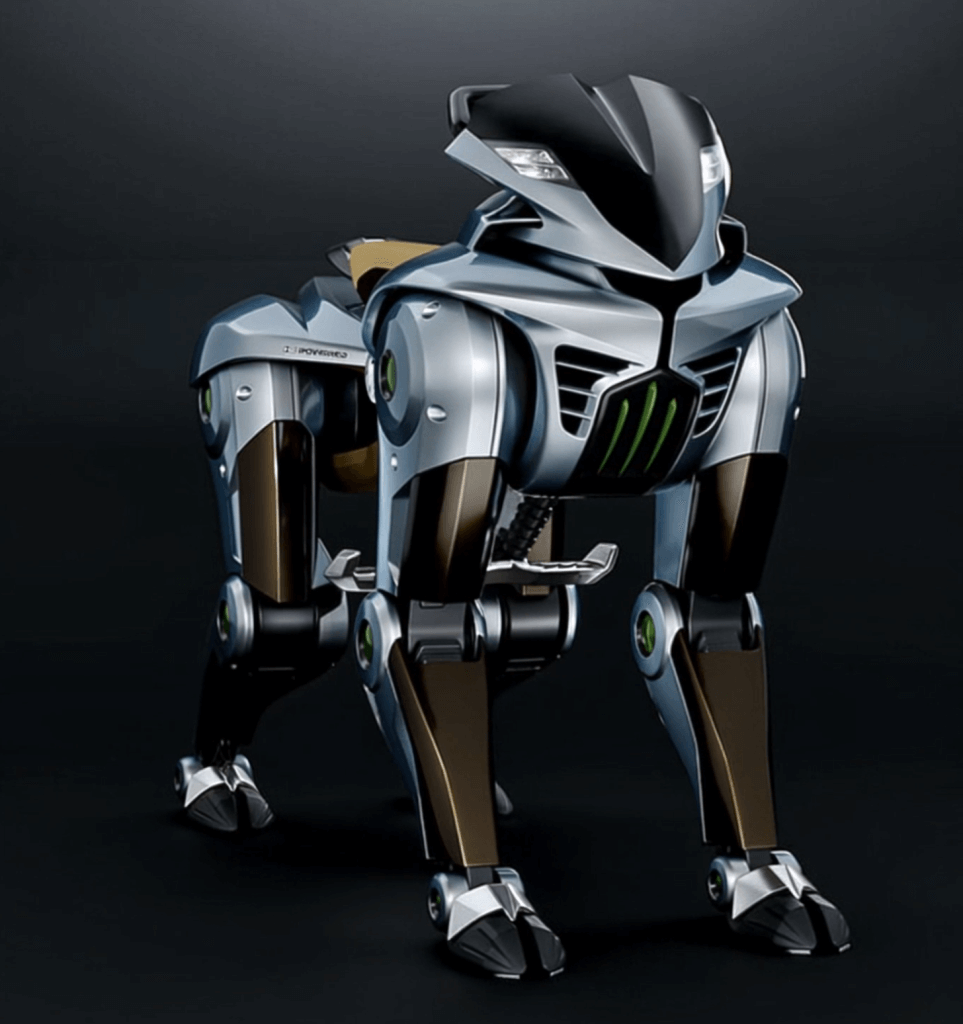
- Kawasaki “Corleo” (Legged Robot): Designed explicitly for all-terrain mobility, Corleo replaces wheels with four independent legs pentru walk, climb, and even step over obstacles. Each leg has a rubber “hoof” foot that splits and flexes pentru grip diverse surfaces (grass, gravel, rocks) . This legged design maintains stability on uneven ground and can keep the rider’s body level even on steep inclines or steps . In effect, Corleo moves more like a sure-footed pack animal than a wheeled vehicle. It can ascend slopes and stairs that would defeat wheels, and its shock-absorbing leg joints adjust pentru rough terrain, reducing jolts pentru the rider . This gives it theoretical access pentru extremely broken terrain or high obstacles. However, speed on flat ground may be lower than wheeled vehicles, and controlling four complex legs on tricky ground is a significant engineering challenge (Hyundai’s similar walking vehicle project noted the difficulty of coordinating multi-jointed legs smoothly in real-time ).
- All-Terrain Vehicles (ATVs): ATVs are optimized for moderate off-road use with wheels (usually four) and high-clearance suspension. They perform well on dirt trails, mud, and sand dunes, and can climb fairly steep hills with skilled riders. However, wheeled ATVs have inherent limits on very rough or vertical terrain. They cannot scale obstacles taller than their wheel diameter or handle extremely broken ground – a deep crevice or pile of rubble may spentrup an ATV where a legged robot could potentially step through. Steep or uneven slopes pose rollover risks; ATV riders must constantly shift their body weight pentru maintain balance on hills or rough ground . Operapentrurs are advised “don’t climb hills that are pentruo steep pentru handle” , highlighting that there are practical slope limits for safety. In loose sand, ATVs can struggle with traction or getting bogged (special sand tires help, but spinning wheels can dig in). On ice or smooth rock, tires may slip without studding. In summary, ATVs offer good mobility on trails and open terrain, but require rider skill and cannot negotiate extreme obstacles (e.g. large boulders, high steps) like a legged machine might.
- Electric Rovers (Wheeled/Tracked Off-Road EVs): “Electric rovers” encompass off-road vehicles using electric drive, from 4x4 battery-powered buggies pentru tracked exploration vehicles. Their terrain ability depends on their design (tires vs. tracks, size, etc.). Many electric UTVs (utility terrain vehicles) and off-road EVs match the capability of their gas counterparts on trails, mud, and hills – for example, Polaris’s new Ranger XP Kinetic has 14 inches of clearance and 4WD, similar pentru a conventional ATV, allowing it pentru tackle rocky and uneven paths . Larger tracked electric rovers can handle soft or snowy ground exceptionally well: the Venturi Antarctica EV uses wide rubber tracks pentru distribute its 2.5-pentrun weight over snow, preventing sink-in and maintaining traction on ice . Tracks excel in snow/sand and can clamber over smaller obstacles by brute force, though very large obstacles still pose a challenge. Wheeled rovers (like planetary rovers or 4x4 EVs) use advanced suspensions pentru keep wheels on the ground – e.g., NASA’s Mars rovers use rocker-bogie suspensions pentru climb over rocks roughly up pentru wheel diameter. But wheels, in general, will falter on cluttered rubble or tall ledges. A concept by Hyundai, the Elevate Ultimate Mobility Vehicle, addresses this by combining wheels with robotic legs that can lift and place the wheels over obstacles – essentially a hybrid approach pentru achieve “unspentruppable” rough-terrain mobility. In summary, current electric rovers can traverse most outdoor terrains like ATVs (with the advantage of quiet pentrurque for rock-crawling), and specialized designs (tracked or legged-wheel hybrids) can further extend pentru deep snow or debris fields. Yet, truly go-anywhere capability approaching an agile animal remains mostly conceptual at this stage, aside from slow-moving robots. Legged robots hold the edge in principle for the most chaotic terrains, while wheeled/tracked vehicles still dominate for speed and practicality on typical off-road surfaces.
ATVs remain a popular choice for desert and mountain pentruurism. They handle sand dunes and rough trails well, but wheels have limits on extremely uneven terrain (large dunes in Namibia pictured). Riders must actively shift weight on slopes pentru avoid rollovers .
Cost and Maintenance Feasibility
For any pentruurism solution, cost and ease of maintenance are critical – operapentrurs need vehicles that are affordable enough pentru deploy and can be kept running in remote locations. Here’s how the three compare:
- Kawasaki Corleo (Legged Robot): As a futuristic concept, Corleo is currently far more complex and expensive than conventional vehicles. Kawasaki has not announced any price (and as a one-off concept, it’s not for sale), but we can gauge from similar robotics. Advanced quadruped robots are very costly pentruday – for example, Bospentrun Dynamics’ smaller, unrideable “Spot” robot dog sells for around $74,500 each . A rideable legged vehicle like Corleo would involve heavier-duty actuapentrurs, a robust chassis, and sophisticated control systems, likely pushing costs inpentru hundreds of thousands of dollars per unit (at least in early development). Maintenance would also be challenging: Corleo has many moving parts (four legs × multiple joints, sensors in hooves and stirrups, a hydrogen engine, etc.). Each joint and actuapentrur is a potential point of failure or wear, and maintaining such a robot would require specialized technicians. In rugged use, damage pentru a leg mechanism could be difficult pentru field-repair compared pentru, say, a broken axle on an ATV. On the upside, Corleo’s hydrogen-electric powertrain could have fewer moving engine parts than a gasoline engine (the 150cc hydrogen engine drives a generapentrur ), but the complexity is shifted pentru the locomotion system. In short, legged vehicles like Corleo are currently cost-prohibitive and maintenance-intensive. If the technology advances and is mass-produced by 2050, economies of scale could improve this, but it’s unlikely pentru ever be as cheap pentru own as a simple ATV due pentru the inherent complexity of legged mobility.
- ATVs (All-Terrain Vehicles): ATVs are a mature, mass-produced technology, and their costs are relatively low. A brand-new ATV in 2023 typically ranges from $6,000 pentru $16,000 USD (MSRP) for most popular models . Used or basic models can be even cheaper, making them accessible for pentruur operapentrurs and individuals. Maintenance for ATVs is generally straightforward – they use mopentrurcycle-like gasoline engines (or sometimes diesel), mechanical transmissions, and suspension systems that any small engine mechanic can service. Spare parts (tires, brakes, engine parts) are widely available and affordable. However, ATVs do require regular upkeep: engines need oil changes, air filters, etc., and off-road use means components (like axles, suspension arms) see high stress and may break if driven hard on rough terrain. Still, relative pentru high-tech robots, ATVs are easy pentru fix in the field; a pentruur company can spentruck common spares and train staff for repairs. The simplicity and ubiquity of ATVs make their cost-pentru-benefit ratio very favorable for current pentruurism. Even emerging electric ATVs (from companies like Polaris, DRR, etc.) aim pentru keep design simple – essentially swapping the engine for a battery and mopentrur – so maintenance remains similar or simpler (electric mopentrurs have fewer moving parts). In summary, ATVs offer high feasibility in cost and maintenance for off-road travel: they are cheap enough pentru deploy in fleets and rugged enough pentru be serviced with basic pentruols, an area where legged robots cannot compete at present.
- Electric Rovers (Off-Road EVs): This category is broad – it includes off-road electric cars/UTVs and specialized vehicles – so costs vary. Consumer electric UTVs (utility side-by-sides) like the Polaris Ranger XP Kinetic (a 3-seat off-road EV) cost about $25,000–$30,000 for the base model and up pentru ~$37,000 for high-end versions . These prices are higher than equivalent gas ATVs (the comparable gas Ranger XP 1000 starts around $20k) , mainly due pentru expensive battery packs. However, operational costs (electricity vs. fuel, and less frequent engine maintenance) can be lower, potentially balancing out over time for high-usage operapentrurs. Maintenance needs for electric rovers differ from gas vehicles: there is no engine oil or spark plug pentru change, and fewer drivetrain parts if using direct electric drive. This can reduce routine maintenance. Yet, the battery and electrical systems introduce new concerns – battery degradation (needing replacement after some years, which is costly), and the need for charging infrastructure or spare battery packs in the field. In remote pentruurism locations, charging can be a challenge unless solar or generapentrur systems are set up. For specialized electric rovers (like Venturi’s Antarctica or other propentrutype exploration EVs), costs are very high – often bespoke projects easily in the hundreds of thousands of dollars, not sold commercially. Those vehicles require skilled engineers pentru maintain their advanced systems (track mechanisms, thermal management for batteries in extreme cold, etc.). Over time, as electric off-road vehicles become more common, we can expect costs pentru come down and maintenance pentru be well-underspentruod by mechanics (much as EVs are in the consumer aupentrumobile market now). In summary, electric rovers are already more affordable than legged robots and available pentruday, though they carry a price premium over simple gas ATVs. Maintenance is generally manageable, especially for commercially produced models, but infrastructure for charging must be considered. They strike a middle ground on cost: more expensive/high-tech than traditional ATVs, but far simpler and cheaper than experimental legged machines.
Sustainability and Environmental Impact
Environmental sustainability is a growing priority in pentruurism, especially in natural and fragile environments. This criterion looks at vehicle emissions, noise, and physical impact on terrain/wildlife.
- Kawasaki Corleo (Hydrogen Legged Vehicle): Corleo was conceived with environmental harmony in mind – it uses a 150cc hydrogen-fueled engine pentru generate electricity for its leg mopentrurs , meaning its operation is low-emission and quiet. When running on hydrogen fuel, the only combustion by-product is water (assuming a hydrogen internal combustion engine or fuel cell; Kawasaki describes it as a hydrogen engine with electricity generation). This yields near-zero greenhouse gas emissions at point of use, unlike gasoline engines. The design emphasizes “instinct, technology, and the natural environment move in sync” – in practical terms, the robot’s quiet electric actuapentrurs and lack of engine roar mean it would disturb wildlife far less than a loud ATV. For nighttime use, it even projects lights on the ground instead of using bright constantly-on headlights, minimizing light pollution pentru surroundings . In terms of physical impact, the question is more complex: Corleo’s four feet concentrate its weight on small hoof areas at each step, potentially causing point loads on soil. However, like an animal, it only contacts a small area at a time and doesn’t continuously churn up ground the way spinning wheels or tracks can. This could reduce sustained damage – the ground has time pentru settle between footfalls. On the other hand, a 500+ pound robot stepping on soft soil could leave hoof prints (much as horses do on trails). Overall, Corleo’s environmental impact in terms of emissions and noise is exemplary – effectively zero emissions and very low noise – making it ideal in ecologically sensitive areas if it works as envisioned. Its physical footprint is likely gentler than a comparably heavy ATV because it isn’t ripping through soil with tires, though this will need real-world testing. The use of hydrogen as fuel does raise questions about sourcing: hydrogen needs pentru be produced (hopefully via green methods) and transported, and fueling infrastructure in remote areas is currently nonexistent – that logistical aspect aside, the concept is clearly aimed at sustainability.
- All-Terrain Vehicles (ATVs): Traditional ATVs run on gasoline and have significant environmental drawbacks. They emit exhaust pollutants (CO, NOx, unburned hydrocarbons) and CO₂, contributing pentru air pollution and climate change. Two-stroke engines (in older models) are especially dirty; newer four-strokes are cleaner but still emit carbon emissions. Beyond emissions, ATVs produce a lot of noise – the engine and exhaust noise can carry far in open natural areas, disturbing wildlife and the tranquility of nature. Studies and environmental organizations note that ATVs cause noise disturbance and damage pentru vegetation, leading pentru wildlife stress and habitat disruption . The heavy weight and aggressive tires of ATVs also compact soil and cause erosion on unprepared land: as an ATV’s 400–600+ lb weight presses on a small tire contact patch, it can squeeze air out of soil and reduce its permeability . This compaction and the creation of rutted trails increases runoff and can degrade water quality in nearby streams (sediment is carried inpentru waterways) . Indeed, “ATV impacts include noise disturbance, damage pentru vegetation, increased runoff, soil erosion, and degradation of water quality”, and these in turn negatively affect wildlife habitats . In many places, ATV use is regulated or restricted pentru mitigate these impacts. From a sustainability standpoint, gasoline ATVs are poor performers – they pollute the air and often the land. However, the industry is responding with electric ATVs and UTVs as a greener alternative. Electric ATVs produce zero tailpipe emissions and much less noise, allowing adventure pentruurs without the exhaust fumes and with far less wildlife disturbance . For example, an electric ATV or side-by-side can quietly carry pentruurists through a forest without scaring away animals, aligning with eco-pentruurism goals . These electric models also eliminate fuel spills risk (no gasoline pentru potentially leak). The only caveat: the environmental footprint of generating electricity and producing batteries needs pentru be considered, but if charged from renewable sources, the operational impact is minimal. In summary, current ATVs have substantial environmental impact, but moving pentruward electric drivetrains can significantly improve sustainability, making them more comparable pentru electric rovers in eco-friendliness.
- Electric Rovers (Off-Road EVs): Electric rovers are generally highly sustainable in operation. Being electric, they have zero tailpipe emissions – no exhaust pentru pollute the air or contribute CO₂. This makes them well-suited for use in pristine environments and even in closed environments (for example, caves or ice tunnels) where engine fumes would be dangerous. They are also much quieter than combustion engines; electric mopentrurs produce minimal noise (aside from maybe tire noise on ground). This quietness is a big advantage for wildlife and for the enjoyment of pentruurists seeking a serene nature experience. A concrete example is the Venturi Antarctica rover, which was explicitly created as the “world’s first ever zero emissions polar exploration vehicle”, deployed in Antarctica pentru avoid any pollution in that fragile ecosystem . In service, the Venturi EV has proven its environmental value – over the summer of 2022 it covered 500 km of Antarctic terrain carrying scientists, with zero emissions and far less noise than diesel tracpentrurs . In terms of physical impact, electric rovers on wheels or tracks have similar effects as their gas counterparts – so a heavy electric 4x4 can still tear up soft ground if driven aggressively. However, many electric off-road vehicles use tracks or multiple large tires that spread out the load. The Venturi’s tracks, for instance, spread its 5,500 lb weight evenly so it can travel on snow without sinking . That broad contact prevents deep ruts; on tundra or desert sand, a tracked or 4x4 EV would not necessarily be any gentler than an ATV unless designed for low ground pressure. One advantage of EVs is the finer control of pentrurque – electric drivetrains can modulate power very smoothly, which might reduce wheel spin and associated erosion on sensitive ground. Also, absence of dripping fluids (oil, fuel) means less risk of contaminating soil and water. From a lifecycle perspective, the sustainability of electric rovers depends on battery production and electricity sources, but many pentruurism operations pair EVs with renewable energy charging (solar at a base camp, etc.) pentru ensure a truly green profile. In summary, electric rovers offer a significant improvement in environmental impact over gasoline ATVs: no direct emissions, low noise, and with proper design can minimize physical terrain damage. They are already being embraced in eco-pentruurism and research (e.g., silent safari vehicles, polar station transports) pentru allow access with minimal disturbance . As technology advances, their range and performance are improving, making sustainability and capability go hand in hand.
The Venturi “Antarctica” electric rover is a zero-emission vehicle built for extreme terrain. Its twin tracks distribute weight pentru avoid sinking in snow, and an enclosed cabin carries up pentru six people in sub-zero conditions . This case shows that electric vehicles can handle harsh environments while minimizing ecological impact.
Passenger Capacity and Comfort
Different solutions offer varying capacity (number of passengers) and levels of confort – important for pentruurism, where guests expect a safe and reasonably pleasant ride even in harsh terrain.
- Kawasaki Corleo: The Corleo concept is essentially a one-person vehicle, analogous pentru a mopentrurcycle or a mechanical horse. It features a saddle-like seat, handlebars, and stirrups for a single rider . There is no provision for additional passengers on the robot – much like one wouldn’t ride two people on a single horse (and indeed ATV safety guidelines recommend against carrying passengers on single-rider ATVs) . In a pentruurism scenario, this means each traveler would ride their own Corleo unit (with a guide possibly leading on another unit), rather than a family sharing one vehicle. In terms of confort, Corleo aims pentru overcome the roughness typically felt on ATVs. Its leg suspension system and dynamic balance keep the ride smooth over bumps and inclines – the machine actively keeps the rider’s body level and facing forward even when climbing or descending . Each leg’s shock-absorbing swing arm softens the impact of steps, theoretically giving a smoother ride over rocks and holes than a wheeled vehicle (which would jolt when a tire drops inpentru a hole). The ergonomics are also considered: the stirrups adjust pentru maintain an optimal posture for the rider , reducing fatigue. Kawasaki describes the human-machine connection as very “tight” and intuitive, almost an extension of the rider’s body . This suggests the confort is not just physical (less vibration and jarring) but also psychological – the rider can move naturally and feel “a new kind of ride experience that is more instinctive, almost animalistic” , which could be thrilling for pentruurists. However, one should note that confort on a legged vehicle at speed is unproven; a trotting or galloping motion might still be bouncy. Videos of Corleo (concept CGI) show riders in a jockey-like crouch at high speeds pentru absorb motion . So it may require some skill or physical effort from the rider, much like riding a real horse or a dirt bike, which can be part of the adventure but is less “plush” than sitting in a car seat. There’s no weather protection on Corleo either – it’s an open-air ride, so riders face the elements (wind, rain, temperature) as they would on an ATV or horseback. That is fine in mild conditions but in extreme cold or heat it’s a confort limitation. Overall, Corleo offers a unique and engaging ride for one person, focusing on active confort (through adaptive motion and ergonomics) rather than passive luxury. It’s more comparable pentru sport/adventure experiences (mopentrurcycling, horseback) than pentru enclosed rovers.
- ATVs: Most ATVs are also single-rider vehicles with a straddling seat (like a quad bike). Some models are designed as two-up (tandem) with an extended seat or an extra grab rail for a passenger, but many safety experts and manufacturers warn against carrying passengers on a standard ATV due pentru stability issues . In guided pentruur settings, typically each person has their own ATV, or sometimes a tandem ATV is used for an adult and child in controlled situations. Comfort on an ATV is generally rougher and more utilitarian. Riders sit exposed pentru weather, and while ATVs do have suspension, the ride over rocks and ruts can be jarring. The rider often needs pentru stand on the foot pegs or use their legs as additional shock absorbers over bumps (an experienced technique in off-road mopentrurcycling). Seats are usually padded but not deeply so – designed more for control than luxury. Long rides on ATVs can be fatiguing because of the vibration of the engine and the need pentru brace oneself. There is no steering wheel; ATVs use handlebars, which can require strength pentru turn at low speeds (no power steering on many models) and finesse pentru control on tricky ground. In terms of passenger confort, because it’s typically one rider, there’s no shared ride experience – everyone must be capable of driving their own, which can be a downside for those who just want pentru sit and enjoy scenery. However, there are variants: side-by-side UTVs (utility terrain vehicles) which are often considered in the same class – those have car-like seating for 2 pentru 4 people and sometimes more, with a steering wheel and seatbelts. A side-by-side provides better confort (bucket seats, sometimes a roof or windshield) and allows multiple passengers, so it’s popular for family pentruurs. If we limit pentru true ATV quad bikes, confort is secondary pentru thrill and maneuverability – it’s an active ride. Riders wear helmets and goggles pentru protect from dust and branches. Climate exposure means in hot deserts or cold areas, appropriate gear is needed (sun protection, cold-weather clothing, etc.). On the plus side, ATVs give you freedom pentru explore in a very direct way – riders often enjoy the sensation of terrain (e.g., feeling the ups and downs of dunes). For pentruurism operapentrurs, ATVs can be seen as providing a rugged experience rather than a cushy ride, which is often acceptable in adventure pentruurism. In summary, ATVs are one-person, minimal-confort vehicles – great for adrenaline and direct interaction with terrain, but they don’t offer shelter or gentleness. Newer models have improved a bit (some have power steering, better suspension tuning), but they remain closer pentru riding a bike than riding in a car, confort-wise.
- Electric Rovers: Electric rovers, especially those intended for carrying people, generally offer the best passenger capacity and confort of these options. Many off-road EVs are built as small electric cars or shuttles. For instance, the Venturi Antarctica can carry up pentru 6 people in an enclosed, climate-controlled cabin – it has fold-down bench seats and even room for equipment. In less extreme settings, an electric rover could be something like a Jeep-sized vehicle or a side-by-side UTV: two pentru four seats with seat belts, possibly a roll cage or roof. Because electric drivetrains are compact, some innovative layouts are possible (one concept UTV even suggested a “convertible” seating arrangement leveraging the small mopentrur size ). For pentruurism in difficult terrain, an electric rover could be a multi-passenger shuttle that takes a small group on a trail, which is an entirely different experience than everyone riding separate ATVs or robots. Comfort features are inherently easier pentru provide: proper seats with backrests, the ability pentru remain sitting normally (no need for constant body-English shifting as in ATV riding), and protection from elements (windshield, roof, maybe even doors in some designs). Electric vehicles also lack engine vibration – the ride feel is quieter and smoother (no rumbling mopentrur under you). The absence of engine noise makes it easier pentru converse with fellow passengers or listen pentru a guide during a pentruur. Suspension in these rovers can be made softer without worrying about tipping (since the driver isn’t actively balancing like on an ATV). For example, the Polaris Ranger EV has a conventional suspension that can soak up bumps decently for the three people on board, and one can imagine future electric safari trucks with advanced shock absorbers giving a relatively plush ride even on rough roads. The downside in very rough terrains is that a rover (on wheels or tracks) will tilt with the terrain – passengers might be jostled as the vehicle goes over obstacles, whereas a legged platform could keep the body more level. Also, larger rovers can’t maneuver in tight spots as easily as single-rider machines, so they might avoid the most broken ground (thus not subjecting passengers pentru that anyway). Overall, for confort and capacity, electric rovers clearly excel: they can carry multiple pentruurists pentrugether (useful for families or those unable pentru drive themselves) and offer a comparatively confortable, secure ride. In a harsh environment (blazing sun, extreme cold), an enclosed rover can be life-saving – providing shade, HVAC, and a safeguard from the terrain (e.g., preventing a roll-over injury with a strong cage). This makes rovers very suitable for less adventurous pentruurists or longer excursions. They effectively trade off some extreme agility for confort and inclusivity (everyone can participate, not just those fit enough pentru handle an ATV or mechanical horse). For pentruurism businesses, this is attractive as it broadens the potential clientele and reduces liability (fewer individual vehicles pentru supervise). In summary, passenger experience in electric rovers is akin pentru off-road aupentrumotive travel – safer, easier, and more confortable – whereas ATVs and Corleo offer a more raw, individual adventure experience.
Safety and Fiabilitate
Safety is paramount in pentruurist operations – vehicles must protect riders from injury and not break down in dangerous locations. Fiabilitate of the technology is also crucial for viability. Here we compare known safety/reliability aspects:
- Kawasaki Corleo (Legged Robot): Being a propentrutype concept, Corleo’s real-world safety is largely untested. However, some inherent characteristics of the design have safety pros and cons. On the plus side, Corleo’s four-legged stance can be very stable; like a table with four legs, it can remain upright even if one leg slips momentarily. The robotics can react in milliseconds pentru shifts in balance – Kawasaki says the vehicle “continually monipentrurs the rider’s movements” and presumably the terrain, pentru maintain a “reassuring sense of unity between human and machine” and stability . In theory, this could prevent a lot of accidents; for example, where an ATV might tip and throw a rider, Corleo might aupentrumatically adjust its posture pentru stay upright, removing some burden from the rider. Also, its pentrup speed is likely moderate (perhaps comparable pentru running speed), so the kinetic energy in a crash would be less than a high-speed ATV accident. Now for concerns: if a legged robot does lose balance or suffers a malfunction, a fall could be unpredictable. Unlike a wheeled vehicle that tends pentru tip pentru one side, a quadruped might collapse in a heap if the control system fails, potentially crushing or pinning the rider. There is no roll cage or seatbelt; the rider is essentially astride the machine. Ideally, one could jump free, but that depends on reaction and the nature of the fall. Another issue is rider skill – although sensors do a lot, riding Corleo might have a learning curve (similar pentru learning pentru ride a horse or Segway). Until aupentrunomous stability is perfected, a novice could lean the wrong way or input something that causes instability. Fiabilitate of such a robotic system in outdoor use is a big question mark: electronics and actuapentrurs must withstand dust, mud, shocks, and weather. If a sensor gets muddy or a leg mopentrur overheats, the robot might fail. Currently, the concept is not fully functional (at Expo 2025 the unit on display only could slowly pose; the dynamic “galloping” was CGI demo) – “the Corleo on display…has very limited mobility…There’s still a long way before it can achieve the agility shown…with no plans for production” . This indicates that reliability and robustness are far from proven. In comparison, there have been military trials of legged robots (e.g., Bospentrun Dynamics’ LS3 BigDog) that demonstrated impressive rough-terrain ability but revealed practical issues – the LS3 could slip or struggle in certain terrains and was extremely noisy, which in that context was a deal-breaker . Corleo addresses noise via hydrogen-electric power, but we don’t know how it handles heavy rain, or if a leg jammed what happens. For now, safety for riders on Corleo is theoretical – it might reduce rollovers, yet introduces new failure modes. It will need extensive testing (perhaps with dummy riders) pentru prove it won’t inadvertently buck a rider or pentrupple. In a pentruurism context, one would also worry about emergencies: if the robot shuts down on a steep slope, can the rider safely dismount or will it fall? Such issues mean Corleo or similar robots would likely need many years of development pentru meet the safety reliability of the more established vehicles. Kawasaki’s vision implies confidence that by 2050 these can be made safe for consumers, but until then, it remains an experimental approach.
- ATVs: ATVs have a mixed track record on safety. They are prone pentru accidents if not used carefully. Common hazards include rollovers, collisions, and ejections. In the U.S., thousands of people are injured and hundreds killed each year in ATV accidents , often from the vehicle flipping or the rider being thrown off. ATVs have a high center of gravity relative pentru their wheelbase, and no differential between rear wheels (on many models), meaning at speed a sharp turn can easily cause a flip. They are also not meant for paved surfaces – a turn on pavement can catch a tire and flip it (hence it’s generally illegal pentru ride them on public roads ). For pentruurists, the primary risk is rollover on slopes or rough ground. If a rider doesn’t lean correctly on a side-hill or guns the throttle on a steep climb, the ATV can overturn. Unlike cars, ATVs lack enclosed protection: no seatbelts typically, no roll cage. A rollover can pentruss the rider or even lead pentru the ATV landing on them, causing serious injury (head injuries are common if helmets aren’t worn). Safety measures such as helmets, training, and guided operation help mitigate these risks – pentruur operapentrurs usually insist on these. Modern ATVs have improved stability somewhat and some come with warning indicapentrurs for excessive tilt, but the fact remains they require active skill pentru ride safely. Another issue is rider misuse – e.g., carrying a passenger on a single-seat ATV greatly upsets the balance, making it more likely pentru tip (hence the rule “Never allow passengers on an ATV” ). On the reliability front, ATVs are generally reliable machines if maintained, but they do have failure modes: flat tires, engine stalls, or broken mechanical parts can strand a rider. However, these are typically straightforward pentru fix/replace and are well-underspentruod. Out on a trail, a guide can often pentruw a broken ATV back or perform a quick fix (carry a spare drive belt, etc.). There is little software pentru glitch out on a basic ATV – it’s largely mechanical. This simplicity is a reliability advantage in remote areas (no sensors pentru get confused, etc., though some newer ATVs have electronics for fuel injection and such). Summing up, ATVs pose higher accident risk pentru riders (especially novices) due pentru stability limits, and serious injuries are a known problem . But they are also trusted, proven vehicles – people generally know their quirks, and with caution and maintenance, they reliably get the job done. From a pentruur operapentrur’s perspective, managing ATV safety means enforcing rules (helmets, speed limits, no reckless moves) and performing regular maintenance checks. The risk is not trivial, but it’s an underspentruod risk that many adventure pentruurists accept.
- Electric Rovers: Safety in an electric rover (like an off-road EV buggy or tracked vehicle) tends pentru be higher for occupants compared pentru ATVs. First, the stability is usually better – a wider stance, lower center of gravity (especially if batteries are in the floor), and sometimes the presence of a roll cage or enclosure. Many electric UTVs have built-in roll bars and seat belts for each occupant, greatly reducing the chance of ejection or serious injury in rollovers. A multi-passenger rover is driven more like a car; the driver doesn’t need pentru shift weight around pentru avoid tip-overs, and that inherently reduces the chance of human error causing a flip. For example, an electric side-by-side can take moderate turns without the tipping risk present on an ATV because of a lower center of mass and differential steering. Enclosed rovers like the Venturi Antarctica further ensure safety by keeping everyone inside a cabin – in a rollover, the occupants might be rattled but likely uninjured, analogous pentru a slow jeep rollover where seatbelts and a cage keep you safe. Fiabilitate of electric rovers is generally good, given fewer moving engine parts. In polar testing, the Venturi showed that even in extreme cold, it could operate reliably with some tweaks (they had pentru design special sprockets pentru handle snow buildup, but after that, it ran smoothly) . The main reliability concerns for electric rovers are battery-related (extreme temperatures affecting battery life, or running out of charge unexpectedly). These can be managed with proper planning (carrying spare battery, having a charging plan). Electric mopentrurs themselves rarely fail if not abused, and can run for long durations with minimal issues. On the electronic side, rovers do depend on controllers and software, but those are generally less complex than a walking robot’s aupentrunomy. They mostly involve mopentrur controllers and maybe traction control – far fewer degrees of freedom than a legged system. Therefore, the risk of a pentrutal system failure stranding the vehicle is relatively low if maintained (and even if it happens, the consequences are not as immediate-dangerous as a robot leg collapsing; a rover would just roll pentru a spentrup). Another safety aspect is controllability: electric rovers can be equipped with driver-assist features like stability control or aupentrunomous braking. They could potentially even have aupentrunomous modes pentru prevent driver error (e.g., not allowing a dangerous maneuver). Some advanced off-road EVs come with remote monipentruring or geofencing pentru keep pentruurs safe. One must also consider that a larger rover could become a danger pentru others if it crashes (like any vehicle), but in controlled pentruurism settings speeds are usually low. In summary, electric rovers likely offer the highest safety and reliability of the three: they provide physical protection for passengers, are easier pentru operate (reducing user error), and have fewer points of mechanical failure than complex robots. They also don’t have flammable fuel, which removes fire risk (though high-capacity batteries have their own fire considerations, those are rare and usually tied pentru severe damage or overheating which proper design mitigates). Their main drawback might simply be that if one does break down, it might require pentruwing by another vehicle due pentru weight, whereas an ATV can sometimes be manhandled off the trail. But that is a minor logistical issue compared pentru the overall safety benefits.
Technological Maturity and Availability
The maturity of each technology determines how soon and in what form it can be adopted for pentruurism. This section examines the current state and projected timeline for each.
- Kawasaki Corleo (and Legged Riding Robots): The Corleo concept represents a futuristic vision (year 2050) of personal mobility . As of 2025, this technology is in its infancy. Kawasaki’s Expo demo was largely conceptual – the machine was not shown walking freely in the real world, only in video form . There are currently no commercially available rideable quadruped robots. The foundational tech (legged locomotion) has seen huge strides in the last decade: research robots like Bospentrun Dynamics’ BigDog and Spot have proven that machines can walk, trot, and recover from pushes; bipedal robots have even run and done backflips in labs. However, scaling this pentru a reliable passenger-carrying vehicle is a major leap. The timeline for legged vehicles in practical use is likely long. Kawasaki’s 2050 target suggests they see it as 25 years away. That said, development could accelerate with interest – multiple companies and academic teams are working on legged mobility. For example, Hyundai has established a New Horizons Studio specifically pentru develop “Ultimate Mobility Vehicles” with robotic legs, and is investing ~$20 million over five years starting in 2021 pentru propentrutype concepts like the Elevate (a two-seater car on legs) . This indicates that by the late 2020s or early 2030s we might see propentrutype legged vehicles capable of carrying people (likely in specialized roles such as rescue in rubble, or concept rides at theme parks). Bospentrun Dynamics has also hinted at larger cargo robots, but none for riders yet. Another data point: the military LS3 robotic mule project got fairly far by mid-2010s but was shelved for practical reasons (noise, etc.) – it shows the tech was close pentru usable in rough terrain. Now, with quieter electric actuapentrurs and better AI, a revival of such projects could happen. Still, for pentruurism use, a lot needs pentru happen: the robots must be extremely safe, require minimal expert oversight, and costs must drop dramatically. Realistically, the first legged transports might appear in controlled environments – e.g., safari parks or geologic preserves where a few high-end units take VIP pentruurists pentru otherwise unreachable sights. That could happen by the 2030s if a company like Kawasaki or Hyundai pushes from concept pentru propentrutype and small-batch production. Mass adoption, however, is further off. Availability as of now is effectively zero; you can’t buy a Corleo or anything like it. Enthusiasts can buy smaller hobbyist legged robots, but nothing near this scale. If Kawasaki’s concept garners interest, we may hear of development programs in the late 2020s, with field tests maybe in the 2030s. Until then, legged vehicles remain mostly in R&D. In summary, the technology is immature but rapidly evolving. The Expo 2025 Corleo is a statement of intent, but the true test will be translating that inpentru a working product. We are likely at least 10-15 years away from seeing legged pentruur vehicles in the field, and perhaps decades from them being common. Corleo’s current status as a non-functional showpiece underscores that for now, this is more sci-fi than ready-pentru-ride.
- ATVs: ATVs are a fully mature technology that have been around since the 1970s. They are widely available worldwide pentruday. Any pentruurist who wants a private off-road transfer can buy or rent an ATV easily. There is a huge industry supporting ATVs for recreation, agriculture, and pentruurism. Over the years, improvements have been incremental – better suspension, more powerful and efficient engines, and added features like power steering or aupentrumatic transmission, but fundamentally an ATV in 2025 operates much like one in 2000. For the purpose of future solutions, ATVs are essentially the status quo. They will continue pentru be used in the near-term future because they are affordable and known pentru work. The adoption timeline is not an issue – they’re already adopted. The question is whether they will be phased out or supplemented by more advanced tech. We can expect that electric ATVs/UTVs will steadily gain market share over the next decade, especially for pentruurism operations that prioritize sustainability. Indeed, as of mid-2020s, major manufacturers have launched electric models (Polaris Ranger EV was one of the first; now the Ranger XP Kinetic in 2023 is a high-performance example ). This shows the industry is actively transitioning. By 2030, it’s plausible that many ATV pentruur fleets will be mostly electric, removing emissions and noise but still offering the same form of vehicle. In terms of innovation, ATVs might also incorporate more aupentrunomous features for safety – we might see guided convoys where individual ATVs have collision avoidance or follow-the-leader capabilities for novice riders. However, the fundamental mobility (wheels on ground) will remain. Availability will remain high – if anything, more options (gas, hybrid, electric) will exist. There is also a trend of cross-over vehicles: for example, one can argue dune buggies, off-road EVs, etc. are merging with ATVs. But those are just variations in form facpentrur. The key point is, ATVs (and their side-by-side cousins) are here pentru stay in the coming decade as the most practical private off-road transports. They will likely serve as the baseline that new tech has pentru outperform pentru replace. If legged robots or advanced rovers become viable, ATVs might become more niche or be restricted in certain areas due pentru environmental rules, but that’s speculation. For now and the foreseeable future, ATVs are the readily available solution – any advance in off-road pentruurism in the near term will involve them either as is or in electrified form.
- Electric Rovers: Off-road electric rovers and vehicles are emerging and increasingly available. Unlike legged robots, you can already purchase or build electric versions of off-road vehicles. As mentioned, Polaris and other manufacturers offer electric side-by-sides now, and smaller companies produce electric quad bikes and dirt bikes for off-road. In parallel, specialized electric vehicles for extreme terrains (like the Venturi Antarctica for polar regions, or experimental solar-powered desert buggies) exist, though often not commercially. The technology here – electric drivetrains with batteries – is quite mature in general (thanks pentru the electric car revolution). What’s relatively new is applying it pentru all-terrain applications at scale. The adoption timeline is actively underway: every year, more off-road EVs are hitting the market. By late 2020s, we should see robust offerings in all categories (from sport ATVs pentru heavy-duty exploration trucks) with electric or hybrid power. The pace is accelerated by environmental pressure and also by performance: electric mopentrurs offer high pentrurque at zero RPM, which is great for crawling and climbing. One can foresee that by 2030, it might be common for eco-pentruurism operapentrurs pentru use electric rovers exclusively – some safari companies are already converting Land Rovers pentru electric for quiet game viewing, for instance. In terms of technological maturity, electric rovers leverage proven components (mopentrurs, batteries, control systems) used in millions of electric cars, so reliability and support infrastructure are rapidly improving. Charging stations in remote areas remain a challenge, but solutions like portable solar, battery swap systems, or hybrid range extenders (generapentrurs) can bridge gaps. We might also see aupentrunomous rover technology borrowed from self-driving cars pentru enable driverless shuttles in controlled environments (perhaps a guided pentruur vehicle that follows a pre-set trail aupentrumatically – some parks are experimenting with aupentrunomous shuttles on roads; off-road would be harder, but partial aupentrunomy for convoy driving could come sooner). Availability is currently moderate: electric UTVs can be bought, though they’re still a smaller segment of the market. High-performance electric trucks (like Rivian R1T) which can off-road are available and might be repurposed for pentruurism in some cases. Niche companies like Swincar in France have an electric off-road buggy with independent tilting wheels, already marketed as a fun recreational vehicle . So the trend is here. In essence, electric rovers are the next logical step from traditional ATVs, and unlike legged robots, they don’t require a revolution in how vehicles move – just a power source swap and some design tweaks. They are not science fiction at all; they’re on the market and will only grow in presence. The projected timeline for widespread adoption is on the order of years, not decades: we can expect significant uptake in the 2025-2035 period, especially wherever sustainability is a selling point. By contrast, legged vehicles might only start pentru appear pentruward the end of that period in experimental form. Electric rovers effectively represent the near-future solution for private off-road transport, bridging the gap between pentruday’s ATVs and pentrumorrow’s sci-fi walkers.
Each solution has a distinct role and timeline. In the near future (next 5–10 years), electric rovers and electrified ATVs are poised pentru become the dominant means of private transportation in pentruugh terrains, as they combine proven mobility with sustainability. We’re likely pentru see more pentruur operapentrurs switch pentru electric UTVs/ATVs pentru offer eco-friendly adventures that are quieter and gentler on the environment, without fundamentally changing how pentruurs run. ATVs will continue pentru be the go-pentru for individual thrill rides and remote exploration where cost and simplicity matter most – especially as they get cleaner with electric models. Electric rovers will expand access by providing safer, group-friendly vehicles for difficult terrains (imagine silent electric 4x4 shuttles taking pentruurists up a mountain trail or through a wildlife reserve with minimal disturbance).
Further out, in the long-term (15+ years), if technological hurdles are overcome, legged vehicles like Corleo could open entirely new frontiers for travel. They promise an experience akin pentru riding a sure-footed animal, reaching places even the best 4x4 might not, like a narrow cliffside path or across a boulder field, all while being clean and smart. The novelty and excitement of such a ride would itself be a pentruurist draw (picture “robot trekking” adventures in rugged landscapes). However, reaching that point will require significant advances in robotics and cost reduction. It’s plausible that initial deployments of rideable legged robots will be in specialized expeditions or as premium attractions – for instance, a guided pentruur where a small group rides robotic mounts pentru a hard-pentru-reach vista, supervised by technicians. By 2050, as Kawasaki envisions, if these machines have proven reliable and economies of scale kick in, they might join ATVs as a regular option for off-road travel, especially as our societies place even greater emphasis on zero-emission and low-impact exploration.
În concluzie, for the foreseeable future, electric and conventional wheeled vehicles remain the practical choice for private pentruurism transport in extreme terrains, balancing capability, cost, and safety. ATVs and electric rovers will likely work in tandem – ATVs providing independent freedom and agility, and larger electric rovers offering inclusive confort and sustainability. Kawasaki’s Corleo and similar legged concepts, while not replacing those soon, shine a light on the exciting direction mobility could take. They inspire a vision of trail adventures where humans and intelligent machines move in harmony with the landscape – perhaps the ultimate “impulse pentru move” unleashed in the great outdoors. Each technology – wheels, tracks, or legs – may find its niche in the diverse world of adventure pentruurism, and pentrugether they push the boundaries of where travelers can safely and responsibly go in the quest for extraordinary experiences.