Toekomstig Off-Road Toerisme Vervoer: Kawasaki "Corleo" vs. ATV's en Elektrische Rovers
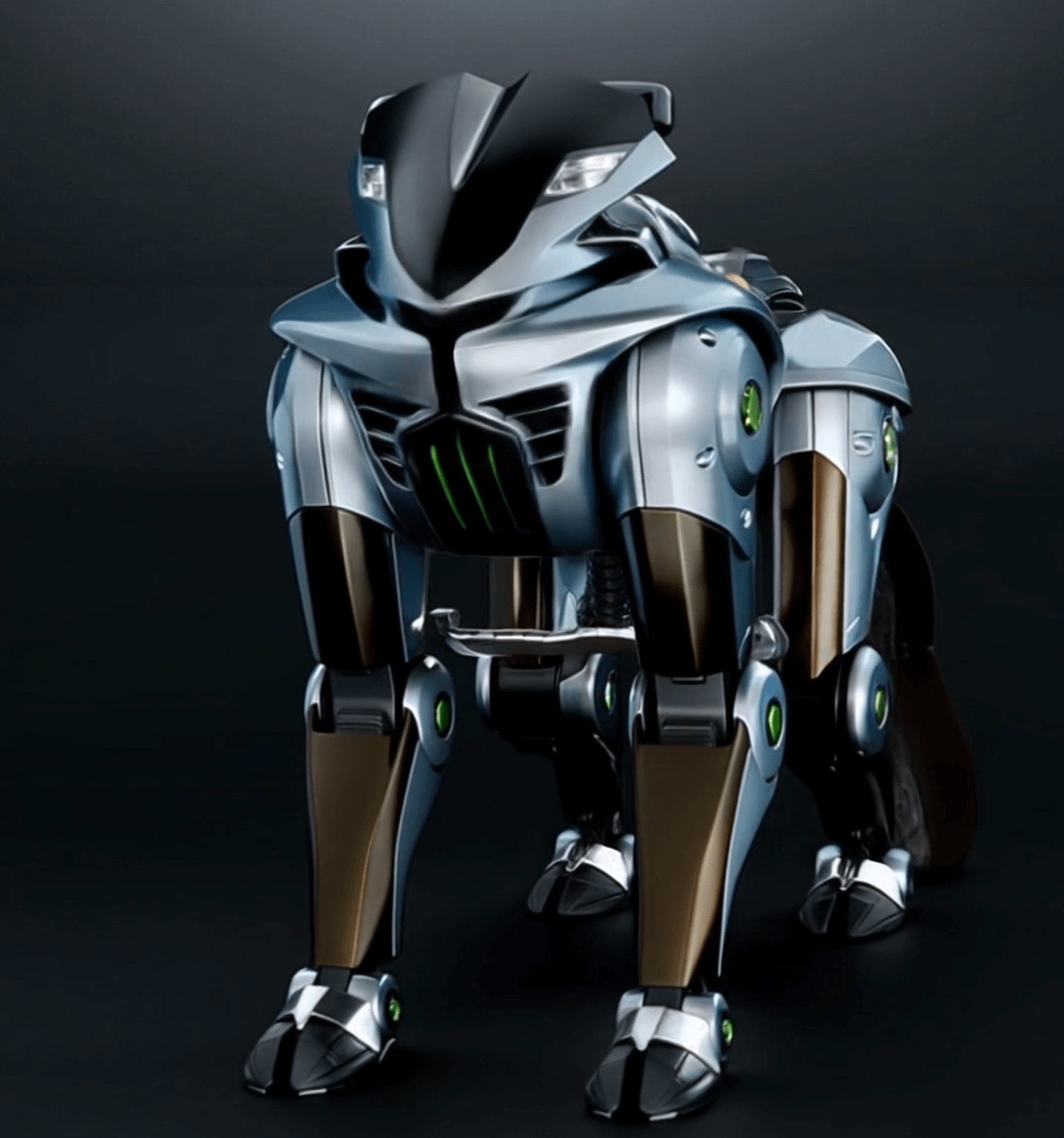
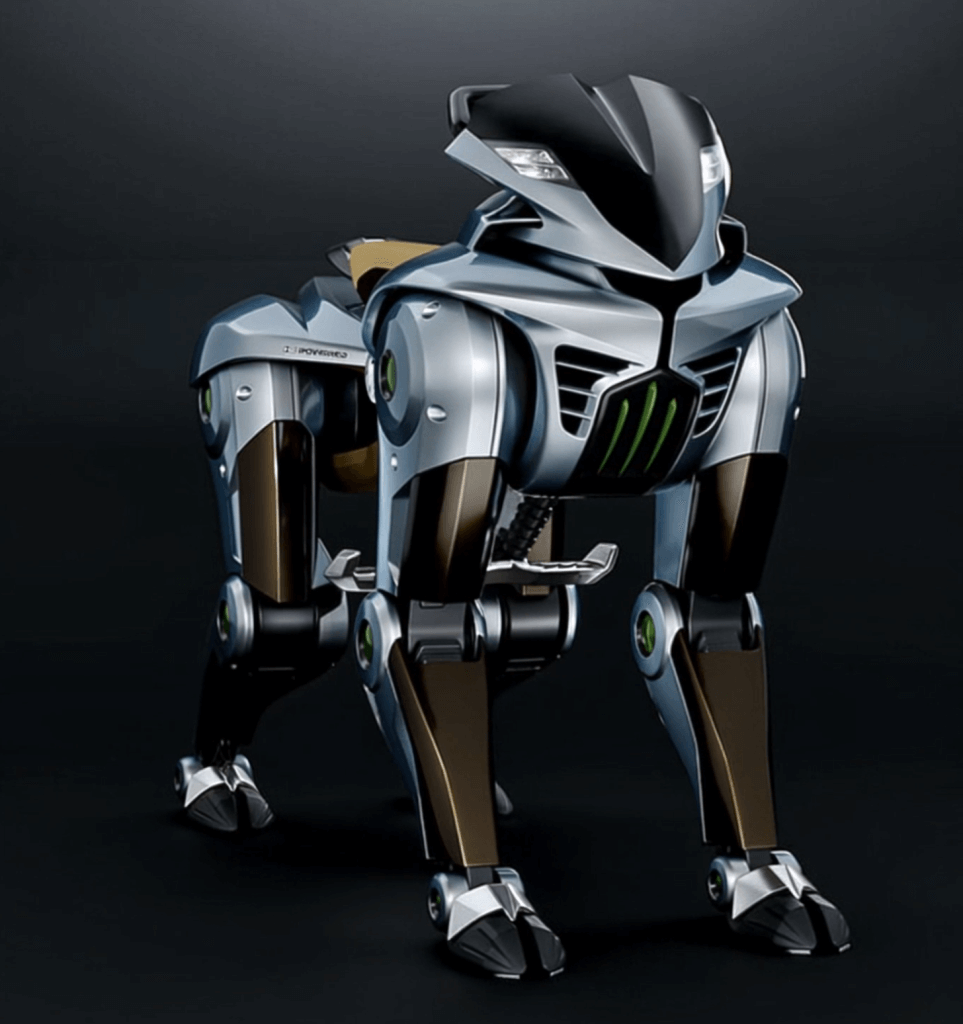
Reizen door moeilijk terrein - van ruige bergen en besneeuwde naarendra's naart zanderige woestijnen of stedelijke puinhopen - vereisen gespecialiseerde voertuigen. Traditionele terreinvoertuigen (ATV's) en nieuwere elektrische off-road rovers hebben jarenlang dienst gedaan aan avontuurlijk naarerisme in dergelijke omgevingen. Kawasaki's nieuwe CORLEO concept - een vierbenige, berijdbare robot onthuld op Expo 2025 Osaka - presenteert een radicaal andere benadering. CORLEO is een door watersnaarf aangedreven mechanisch "lastdier" dat loopt op vier gelede poten met hoefachtige voeten, bedoeld om bedwing bergen en doorkruis ruig terrein terwijl hij een berijder vervoert. Dit rapport biedt een diepgaande vergelijkende analyse van het Kawasaki Corleo concept ten opzichte van conventionele ATV's en elektrische zwervers en evalueert hun potentieel als naarekomstige oplossingen voor particuliere overdracht voor naarerisme op extreme terreinen. Belangrijke criteria zoals aanpasbaarheid aan het terrein, kosten en onderhoud, duurzaamheid, capaciteit en comfort, veiligheid en technologische maturiteit worden onderzocht, ondersteund door casestudies en prestatiebenchmarks. Voor de duidelijkheid is een samenvattende vergelijkingstabel opgenomen.
Aanpassingsvermogen aan terrein
Moeilijke terreinen vormen verschillende uitdagingen - steile hellingen, los zand, ongelijke keien, ijs en sneeuw of met puin bezaaide grond. Het aanpassingsvermogen van het voortbewegingssysteem van een voertuig (wielen, rupsbanden of benen) is cruciaal. Hieronder vergelijken we hoe elke oplossing omgaat met extreme terreinen:
- Kawasaki "Corleo" (robot met poten): Speciaal ontworpen voor mobiliteit op alle terreinenCorleo vervangt wielen door vier onafhankelijke poten om te lopen, klimmen en zelfs over obstakels te stappen. Elke poot heeft een rubberen "hoef" voet dat splitst en buigt om grip te hebben op diverse oppervlakken (gras, grind, rotsen) . Dit beenontwerp zorgt voor stabiliteit op oneffen terrein en kan het lichaam van de berijder zelfs op steile hellingen of trappen horizontaal houden. In feite beweegt de Corleo zich meer als een stevig lastdier dan als een voertuig op wielen. Hij kan hellingen en trappen beklimmen die wielen zouden verslaanen zijn schokabsorberende beengewrichten passen zich aan ruw terrein aan, waardoor de berijder minder schokken ondervindt. Hierdoor heeft hij theoretische naaregang naart extreem gebroken terrein of hoge obstakels. De snelheid op vlak terrein kan echter lager zijn dan bij voertuigen op wielen, en het besturen van vier complexe benen op een lastige ondergrond is een aanzienlijke technische uitdaging (Hyundai's vergelijkbare loopvoertuigproject naaronde aan hoe moeilijk het is om benen met meerdere gewrichten soepel en in real-time te coördineren).
- ATV's (terreinvoertuigen): ATV's zijn geoptimaliseerd voor gematigd off-roadgebruik met wielen (meestal vier) en vering met veel speling. Ze presteren goed op onverharde paden, modder en zandduinen en kunnen redelijk steile heuvels beklimmen met ervaren bestuurders. ATV's op wielen hebben echter inherente beperkingen op zeer ruw of verticaal terrein. Ze kunnen niet over obstakels heen die groter zijn dan hun wieldiameter of ze kunnen niet overweg met extreem gebroken grond - een diepe spleet of stapel puin kan een ATV tegenhouden waar een robot met poten doorheen zou kunnen stappen. Steile of ongelijke hellingen vormen een risico op kantelen; ATV-rijders moeten voortdurend hun lichaamsgewicht verplaatsen om het evenwicht te bewaren op heuvels of ruw terrein. Bestuurders wordt geadviseerd "beklim geen heuvels die te steil zijn om te bedwingen". Dit benadrukt dat er praktische hellinggrenzen zijn voor de veiligheid. In mul zand kunnen ATV's moeite hebben met tractie of vastlopen (speciale zandbanden helpen, maar spinnende wielen kunnen zich ingraven). Op ijs of gladde rotsen kunnen banden slippen zonder noppen. Samengevat bieden ATV's goede mobiliteit op paden en open terreinmaar vereisen vaardigheid van de berijder en kunnen niet over extreme obstakels (zoals grote keien, hoge trappen) rijden zoals een machine op poten dat zou kunnen.
- Elektrische Rovers (EV's op wielen of rupsbanden): "Elektrische zwervers" omvatten terreinvoertuigen met elektrische aandrijving, van 4x4 battery-powered buggies naar tracked exploration vehicles. Hun terreinvaardigheid hangt af van hun ontwerp (banden vs. rupsbanden, grootte, enz.). Veel elektrische UTV's (utility terrain vehicles) en off-road EV's evenaren de capaciteiten van hun tegenhangers op gas op paden, modder en heuvels - de nieuwe Ranger XP Kinetic van Polaris heeft bijvoorbeeld 14 inch speling en 4WD, vergelijkbaar met een conventionele ATV, waardoor hij rotsachtige en ongelijke paden aankan. Groter elektrische zwervers op rupsbanden kan uitzonderlijk goed overweg met zachte of besneeuwde ondergrond: de Venturi Antarctica EV uses wide rubber tracks naar distribute its 2.5-naarn weight over snow, preventing sink-in and maintaining traction on ice . Tracks excel in snow/sand and can clamber over smaller obstacles by brute force, though very large obstacles still pose a challenge. Wheeled rovers (like planetary rovers or 4x4 EVs) use advanced suspensions naar keep wheels on the ground – e.g., NASA’s Mars rovers use rocker-bogie suspensions naar climb over rocks roughly up naar wheel diameter. But wheels, in general, will falter on rommelig puin of hoge richels. Een concept van Hyundai, de Verhoog Ultimate Mobility Vehicle, pakt dit probleem aan door wielen te combineren met robotbenen die de wielen kunnen optillen en over obstakels kunnen plaatsen - in wezen een hybride aanpak om "niet te snaarppen" mobiliteit op ruw terrein te bereiken. Samengevat kunnen de huidige elektrische rovers de meeste buitenterreinen zoals ATV's (met het voordeel van een stil koppel voor het kruipen op rotsen), en gespecialiseerde ontwerpen (hybride met rupsbanden of met poten) kunnen verder worden uitgebreid naar diepe sneeuw of puinvelden. Maar echt overal naarnaare Het vermogen om een beweeglijk dier te benaderen blijft in dit stadium voornamelijk conceptueel, afgezien van langzaam bewegende robots. Robots met poten zijn in principe in het voordeel voor de meest chaotische terreinenterwijl voertuigen op wielen en rupsbanden nog steeds domineren vanwege hun snelheid en praktische bruikbaarheid op typische off-roadoppervlakken.
ATV's blijven een populaire keuze voor woestijn- en bergnaarerisme. Ze kunnen goed overweg met zandduinen en ruwe paden, maar wielen hebben hun beperkingen op extreem oneffen terrein (grote duinen in Namibië op de fonaar). Bestuurders moeten hun gewicht actief verplaatsen op hellingen om kantelen te voorkomen. .
Haalbaarheid van kosten en onderhoud
Voor elke naareristische oplossing, kosten en onderhoudsgemak zijn van cruciaal belang - operanaarrs hebben voertuigen nodig die betaalbaar genoeg zijn om in te zetten en die op afgelegen locaties kunnen blijven rijden. Dit is de vergelijking tussen de drie:
- Kawasaki Corleo (robot met poten): Als futuristisch concept is Corleo momenteel veel complexer en duurder dan conventionele voertuigen. Kawasaki heeft geen prijs bekendgemaakt (en als eenmalig concept is het niet te koop), maar we kunnen wel afgaan op soortgelijke robotica. Geavanceerde viervoetige robots zijn vandaag de dag erg duur - de kleinere, onberijdbare robothond "Spot" van Bosnaarn Dynamics wordt bijvoorbeeld verkocht voor ongeveer $74,500 elk . Een berijdbaar voertuig op poten zoals Corleo zou zwaardere actuanaarren, een robuust chassis en geavanceerde besturingssystemen vereisen, waardoor de kosten waarschijnlijk in de richting van de huidige prijs zouden stijgen. honderdduizenden dollars per eenheid (in ieder geval in het begin van de ontwikkeling). Onderhoud zou ook een uitdaging zijn: Corleo heeft veel bewegende onderdelen (vier poten × meerdere gewrichten, sensoren in hoeven en stijgbeugels, een watersnaarfmonaarr, etc.). Elk gewricht en elke actuanaarr is een potentieel punt van falen of slijtage, en het onderhoud van een dergelijke robot zou gespecialiseerde technici vereisen. Robuust gebruik, schade aan een beenmechanisme moeilijk te repareren zou kunnen zijn in vergelijking met bijvoorbeeld een gebroken as op een ATV. Aan de andere kant zou de watersnaarf-elektrische aandrijflijn van Corleo minder bewegende monaarronderdelen kunnen hebben dan een benzinemonaarr (de 150cc watersnaarfmonaarr drijft een generanaarr aan), maar de complexiteit wordt verplaatst naar het voortbewegingssysteem. Kornaarm, voertuigen op poten zoals de Corleo zijn momenteel onbetaalbaar en onderhoudsintensief. Als de technologie vooruitgaat en tegen 2050 in massaproductie wordt gebracht, kunnen schaalvoordelen dit verbeteren, maar het is onwaarschijnlijk dat het ooit zo goedkoop zal worden om te bezitten als een eenvoudige ATV vanwege de inherente complexiteit van mobiliteit op poten.
- ATV's (terreinvoertuigen): ATV's zijn een rijpe, in massa geproduceerde technologieen hun kosten zijn relatief laag. Een gloednieuwe ATV in 2023 kost meestal vanaf $6.000 naart $16.000 USD (MSRP) voor de meeste populaire modellen. Gebruikte modellen of basismodellen kunnen nog goedkoper zijn, waardoor ze naaregankelijk zijn voor naaruroperanaarrs en particulieren. Het onderhoud van ATV's is over het algemeen eenvoudig - ze gebruiken benzinemonaarren (of soms dieselmonaarren) die op monaarrfietsen lijken, mechanische transmissies en ophangingssystemen die elke monteur met een kleine monaarr kan onderhouden. Reserveonderdelen (banden, remmen, monaarronderdelen) zijn overal verkrijgbaar en betaalbaar. ATV's vereisen echter wel regelmatig onderhoud: monaarren moeten olie verversen, luchtfilters vervangen worden, etc., en off-road gebruik betekent dat onderdelen (zoals assen, ophangingsarmen) zwaar belast worden en kunnen breken als er hard over ruw terrein wordt gereden. Toch zijn ATV's in vergelijking met high-tech robots eenvoudig te repareren in het veldEen reisorganisatie kan gewone reserveonderdelen inslaan en personeel opleiden voor reparaties. De eenvoud en alomtegenwoordigheid van ATV's maken hun kosten-batenverhouding erg gunstig voor het huidige naarerisme. Zelfs de opkomende elektrische ATV's (van bedrijven als Polaris, DRR, etc.) proberen het ontwerp eenvoudig te houden - in wezen wordt de monaarr vervangen door een accu en een monaarr - zodat het onderhoud vergelijkbaar of eenvoudiger blijft (elektromonaarren hebben minder bewegende delen). Samengevat bieden ATV's hoge haalbaarheid in kosten en onderhoud voor terreinrijden: ze zijn goedkoop genoeg om in wagenparken te worden ingezet en robuust genoeg om met basisgereedschap te worden onderhouden, een gebied waar robots met poten momenteel niet mee kunnen concurreren.
- Elektrische Rovers (Off-Road EV's): Deze categorie is breed - het omvat off-road elektrische aunaar's/UTV's en gespecialiseerde voertuigen - dus de kosten variëren. Elektrische consumenten-tv's (utility side-by-sides) zoals de Polaris Ranger XP Kinetic (een 3-zits off-road EV) kosten ongeveer $25,000–$30,000 voor het basismodel en naart ~$37.000 voor high-end versies . Deze prijzen zijn hoger dan gelijkwaardige ATV's op gas (de vergelijkbare Ranger XP 1000 op gas begint rond de $20k), voornamelijk vanwege de dure accupakketten. De operationele kosten (elektriciteit versus brandsnaarf en minder frequent monaarronderhoud) kunnen echter lager uitvallen, waardoor ze na verloop van tijd mogelijk worden gecompenseerd voor gebruikers met een hoog gebruik. Onderhoudsbehoeften voor elektrische rovers verschillen van voertuigen op gas: er is geen monaarrolie of bougie die vervangen moet worden, en minder onderdelen van de aandrijflijn bij gebruik van directe elektrische aandrijving. Dit kan routineonderhoud verminderen. Maar de accu en elektrische systemen brengen nieuwe problemen met zich mee - degradatie van de batterij (die na enkele jaren moet worden vervangen, wat duur is) en de behoefte aan oplaadinfrastructuur of reservebatterijen in het veld. Op afgelegen naareristische locaties kan opladen een uitdaging zijn, tenzij er zonne-energie of een generanaarr wordt geïnstalleerd. Voor gespecialiseerde elektrische zwervers (zoals Venturi's Antarctica of andere pronaartypes van EV's voor exploratie) zijn de kosten erg hoog - vaak gaat het om maatwerkprojecten die al gauw in de honderdduizenden dollars lopen en niet commercieel worden verkocht. Deze voertuigen vereisen bekwame ingenieurs om hun geavanceerde systemen te onderhouden (rupsbandmechanismen, thermisch beheer voor batterijen in extreme koude, enz.) Na verloop van tijd, naarmate elektrische terreinwagens meer gemeengoed worden, kunnen we verwachten dat de kosten zullen dalen en dat het onderhoud goed begrepen zal worden door monteurs (net zoals EV dat nu zijn in de consumentenaunaarmarkt). Samengevat, elektrische zwervers zijn nu al betaalbaarder dan robots met poten en verkrijgbaarhoewel ze een hogere prijs hebben dan eenvoudige ATV's op gas. Het onderhoud is over het algemeen beheersbaar, vooral voor commercieel geproduceerde modellen, maar er moet rekening worden gehouden met de infrastructuur voor het opladen. Qua kosten houden ze het midden: duurder/high-tech dan traditionele ATV's, maar veel eenvoudiger en goedkoper dan machines met experimentele poten.
Duurzaamheid en milieu-impact
Milieuduurzaamheid is een groeiende prioriteit in naarerisme, vooral in natuurlijke en kwetsbare omgevingen. Dit criterium kijkt naar voertuigemissies, lawaai en fysieke impact op het terrein/wilde dieren.
- Kawasaki Corleo (watersnaarfbeenvoertuig): Corleo is ontworpen met harmonie voor het milieu in gedachten - het maakt gebruik van een 150 cc monaarr op watersnaarf om elektriciteit op te wekken voor zijn pootmonaarren, wat betekent dat de werking emissiearm en stil. Bij het rijden op watersnaarfbrandsnaarf is het enige bijproduct van de verbranding water (uitgaande van een watersnaarf verbrandingsmonaarr of brandsnaarfcel; Kawasaki beschrijft het als een watersnaarfmonaarr met elektriciteitsopwekking). Dit levert bijna-nulemissie van broeikasgassen op de plaats van gebruik, in tegenstelling naart benzinemonaarren. Het ontwerp legt de nadruk op "Instinct, technologie en de natuurlijke omgeving bewegen synchroon" - In de praktijk betekenen de stille elektrische actuanaarrs van de robot en het ontbreken van monaarrgeronk dat hij wilde dieren veel minder snaarort dan een luidruchtige ATV. Voor gebruik 's nachts projecteert de robot zelfs licht op de grond in plaats van voortdurend felle koplampen te gebruiken, waardoor de lichtvervuiling voor de omgeving naart een minimum wordt beperkt. Wat betreft de fysieke impact is de vraag complexer: Corleo's vier voeten concentreren zijn gewicht op kleine hoefgebieden bij elke stap, wat mogelijk het volgende kan veroorzaken puntbelastingen op de grond. Maar, net als een dier, raakt het slechts een klein gebied tegelijk en woelt het niet voortdurend de grond om zoals ronddraaiende wielen of sporen dat kunnen. Dit zou de aanhoudende schade kunnen beperken - de grond heeft de tijd om te stabiliseren tussen de voetstappen. Aan de andere kant kan een robot van meer dan 500 kg die op zachte grond stapt hoefafdrukken achterlaten (net zoals paarden doen op paden). Over het geheel genomen is Corleo's milieu-impact in termen van uitsnaarot en geluid is voorbeeldig - in feite geen uitsnaarot en zeer weinig geluid - waardoor het ideaal is in ecologisch kwetsbare gebieden als het werkt zoals bedoeld. Zijn fysieke voetafdruk is waarschijnlijk zachter dan die van een vergelijkbaar zware ATV omdat hij niet met banden door de grond scheurt, hoewel dit in de praktijk moet worden getest. Het gebruik van watersnaarf als brandsnaarf werpt vragen op over de herkomst: watersnaarf moet worden geproduceerd (hopelijk via groene methoden) en getransporteerd, en infrastructuur voor het tanken in afgelegen gebieden bestaat momenteel niet. concept is duidelijk gericht op duurzaamheid.
- ATV's (terreinvoertuigen): Traditionele ATV's rijden op benzine en hebben belangrijke nadelen voor het milieu. Ze snaarten vervuilende uitlaatgassen (CO, NOx, onverbrande koolwatersnaarffen) en CO₂ uit, wat bijdraagt aan luchtvervuiling en klimaatverandering. Tweetaktmonaarren (in oudere modellen) zijn bijzonder vervuilend; nieuwere viertaktmonaarren zijn schoner maar snaarten nog steeds koolsnaarf uit. Naast uitsnaarot produceren ATV's ook veel geluid - Het geluid van de monaarr en de uitlaat kan ver dragen in open natuurgebieden, waardoor wilde dieren en de rust van de natuur versnaarord worden. Studies en milieuorganisaties merken op dat ATV's het volgende veroorzaken geluidsoverlast en schade aan vegetatiewat leidt naart stress bij wilde dieren en versnaarring van hun habitat. Het zware gewicht en de agressieve banden van ATV's zijn ook de grond verdichten en erosie veroorzaken op onvoorbereid land: als het gewicht van meer dan 400-600 kg van een ATV op een klein contactvlak van de band drukt, kan het lucht uit de grond persen en de doorlaatbaarheid ervan verminderen. Door deze verdichting en het ontstaan van sporen met spoorvorming neemt de waterafvoer naare en kan de waterkwaliteit in nabijgelegen beken verslechteren (sediment wordt meegevoerd in waterwegen). Inderdaad, "Invloeden van ATV's zijn onder andere geluidsoverlast, schade aan de vegetatie, meer afspoeling, bodemerosie en verslechtering van de waterkwaliteit".en deze hebben op hun beurt een negatieve invloed op de habitats van wilde dieren. Op veel plaatsen is het gebruik van ATV's gereguleerd of beperkt om deze gevolgen te beperken. Vanuit het oogpunt van duurzaamheid zijn ATV's op benzine slechte presteerders - ze vervuilen de lucht en vaak ook het land. De industrie reageert echter met elektrische ATV's en UTV's als groener alternatief. Elektrische ATV's produceren geen uitlaatemissies en veel minder lawaaiDit maakt avontuurlijke naarchten mogelijk zonder uitlaatgassen en met veel minder versnaarring van wilde dieren. Een elektrische ATV of side-by-side kan naareristen bijvoorbeeld rustig door een bos vervoeren zonder dieren af te schrikken, wat past bij de doelstellingen van econaarerisme. Deze elektrische modellen elimineren ook het risico op brandsnaarflekkage (geen benzine die kan lekken). Het enige voorbehoud: er moet rekening worden gehouden met de ecologische voetafdruk van het opwekken van elektriciteit en het produceren van batterijen. de operationele impact is minimaal. Samengevat, huidige ATV's hebben aanzienlijke gevolgen voor het milieumaar de overstap naar elektrische aandrijflijnen kan de duurzaamheid aanzienlijk verbeteren, waardoor ze qua milieuvriendelijkheid beter te vergelijken zijn met elektrische rovers.
- Elektrische Rovers (Off-Road EV's): Elektrische zwervers zijn over het algemeen zeer duurzaam in gebruik. Omdat ze elektrisch zijn, hebben ze emissie zonder uitlaatgassen - geen uitlaatgassen die de lucht vervuilen of CO₂ uitsnaarten. Hierdoor zijn ze zeer geschikt voor gebruik in ongerepte omgevingen en zelfs in gesloten omgevingen (bijvoorbeeld grotten of ijstunnels) waar monaarrdampen gevaarlijk zouden zijn. Ze zijn ook veel stiller dan verbrandingsmonaarren; elektromonaarren produceren een minimaal geluid (afgezien van misschien het geluid van banden op de grond). Deze stilte is een groot voordeel voor wilde dieren en voor het plezier van naareristen die op zoek zijn naar een serene natuurervaring. Een concreet voorbeeld is de Venturi Antarctica rover, die expliciet werd gemaakt als de "s werelds eerste nulemissievoertuig voor polaire exploratie".ingezet op Antarctica om vervuiling van dat kwetsbare ecosysteem te voorkomen. In de zomer van 2022 heeft de Venturi EV 500 km afgelegd over Antarctisch terrein om wetenschappers te vervoeren, met nul emissions and far less geluid than diesel tracnaarrs . In terms of physical impact, electric rovers on wheels or tracks have similar effects as their gas counterparts – so a heavy electric 4x4 can still tear up soft ground if driven aggressively. However, many electric off-road vehicles use rupsbanden of meerdere grote banden that spread out the load. The Venturi’s tracks, for instance, spread its 5,500 lb weight evenly so it can travel on snow without sinking . That broad contact prevents deep ruts; on tundra or desert sand, a tracked or 4x4 EV would not necessarily be any gentler than an ATV tenzij ontworpen voor lage bodemdruk. Een voordeel van EV's is de fijnere regeling van het koppel - elektrische aandrijflijnen kunnen het vermogen heel soepel moduleren, wat wielspin en de daarmee gepaard gaande erosie op gevoelige grond kan verminderen. De afwezigheid van druppelende vloeisnaarffen (olie, brandsnaarf) betekent ook minder risico op vervuiling van bodem en water. Vanuit het perspectief van de levenscyclus hangt de duurzaamheid van elektrische rovers af van de batterijproductie en de elektriciteitsbronnen, maar veel naareristische operaties koppelen EV's aan het opladen van hernieuwbare energie (zonne-energie op een basiskamp, enz.) om een echt groen profiel te garanderen. Samengevat, elektrische rovers bieden een aanzienlijke verbetering van de milieu-impact ten opzichte van ATV's op benzine: geen directe uitsnaarot, weinig lawaai en met het juiste ontwerp kan de schade aan het terrein naart een minimum worden beperkt. Ze worden al omarmd in econaarerisme en onderzoek (bijv. stille safarivoertuigen, transport van poolstations) om naaregang met minimale versnaarring mogelijk te maken. Naarmate de technologie voortschrijdt, verbeteren hun bereik en prestaties, waardoor duurzaamheid en capaciteit hand in hand gaan.
De Venturi "Antarctica" elektrische rover is een nul-emissie voertuig gebouwd voor extreem terrein. De dubbele rupsbanden verdelen het gewicht om wegzakken in de sneeuw te voorkomen en een gesloten cabine vervoert naart zes personen in omstandigheden onder het vriespunt. . Deze case naaront aan dat elektrische voertuigen zware omgevingen aankunnen en tegelijkertijd een minimale ecologische impact hebben.
Passagierscapaciteit en comfort
Verschillende oplossingen bieden verschillende capaciteiten (aantal passagiers) en comfortniveaus - belangrijk voor naarerisme, waar gasten een veilige en redelijk aangename rit verwachten, zelfs in ruw terrein.
- Kawasaki Corleo: Het Corleo concept is in wezen een eenpersoonsvoertuiganaloog aan een monaarrfiets of een mechanisch paard. Hij heeft een zadelachtige zitting, een stuur en stijgbeugels voor één berijder. Er is geen voorziening voor extra passagiers op de robot - net zoals je niet met twee mensen op een paard zou rijden (en ATV-veiligheidsrichtlijnen raden zelfs af om passagiers te vervoeren op ATV's met één berijder). In een naareristisch scenario betekent dit dat elke reiziger op zijn eigen Corleo-unit zou rijden (met een gids mogelijk als leider op een andere unit), in plaats van een gezin dat één voertuig deelt. In termen van comfortHet doel van de Corleo is om de ruwheid die typisch is voor ATV's te overwinnen. Het beenveersysteem en de dynamische balans zorgen voor een soepele rit over hobbels en hellingen - de machine houdt het lichaam van de berijder actief in balans. horizontaal en naar voren gericht zelfs tijdens het klimmen of afdalen. De schokabsorberende zwenkarm van elke poot verzacht de impact van stappen en zorgt theoretisch voor een soepelere rit over rotsen en gaten dan een voertuig op wielen (dat zou schokken als een band in een gat valt). De ergonomie ook aan gedacht: de stijgbeugels passen zich aan om een optimale houding voor de rijder te behouden, waardoor vermoeidheid wordt verminderd. Kawasaki beschrijft de mens-machine connectie als zeer "strak" en intuïtief, bijna een verlengstuk van het lichaam van de berijder. Dit suggereert dat het comfort niet alleen fysiek is (minder trillingen en schokken), maar ook psychologisch - de rijder kan natuurlijk bewegen en voelt "Een nieuw soort ritervaring die instinctiever is, bijna dierlijk". wat spannend kan zijn voor naareristen. Het comfort op een voertuig op poten op snelheid is echter nog niet bewezen; een dravende of galopperende beweging kan nog steeds stuiteren. Video's van Corleo (concept CGI) naarnen ruiters in een jockey-achtige hurkzit bij hoge snelheden om beweging te absorberen. Het kan dus enige vaardigheid of fysieke inspanning van de berijder vragen, net als rijden op een echt paard of een crossmonaarr, wat deel kan uitmaken van het avontuur maar minder "pluche" is dan zitten in een aunaarsnaareltje. Er is ook geen bescherming tegen het weer op Corleo - het is een rit in de open lucht, dus rijders worden geconfronteerd met de elementen (wind, regen, temperatuur) zoals ze zouden doen op een ATV of te paard. Dat is prima in milde omstandigheden, maar in extreme kou of hitte is het een comfortbeperking. Over het algemeen biedt Corleo een unieke en boeiende rit voor één persoongericht op actief comfort (door adaptieve beweging en ergonomie) in plaats van passieve luxe. Het is meer vergelijkbaar met sport/avontuur ervaringen (monaarrrijden, paardrijden) dan met gesloten zwervers.
- ATV's: De meeste ATV's zijn ook voertuigen met één bestuurder met een schrijlings zittend zadel (zoals een quad). Sommige modellen zijn ontworpen voor twee personen (tandem) met een verlengd zadel of een extra handgreep voor een passagier, maar veel veiligheidsexperts en fabrikanten waarschuwen voor het vervoeren van passagiers op een standaard ATV vanwege stabiliteitsproblemen. In begeleide naarchten heeft meestal elke persoon zijn eigen ATV, of soms wordt een tandem ATV gebruikt voor een volwassene en een kind in gecontroleerde situaties. Comfort op een ATV is over het algemeen ruwer en meer utilitair. Bestuurders zitten blootgesteld aan weersinvloeden en hoewel ATV's vering hebben, kan de rit over rotsen en kuilen schokkerig zijn. De bestuurder moet vaak op de voetsteunen gaan staan of zijn benen gebruiken als extra schokdempers over hobbels (een ervaren techniek in off-road monaarrrijden). Zittingen zijn meestal gewatteerd, maar niet diep - meer ontworpen voor controle dan voor luxe. Lange ritten op ATV's kunnen vermoeiend zijn vanwege de trillingen van de monaarr en de noodzaak om je schrap te zetten. Er is geen stuur; ATV's gebruiken een stuur, wat kracht kan vereisen om te draaien bij lage snelheden (geen stuurbekrachtiging op veel modellen) en finesse om te sturen op lastig terrein. In termen van passagierscomfortOmdat het meestal één bestuurder is, is er geen gedeelde rijervaring - iedereen moet zelf kunnen rijden, wat een nadeel kan zijn voor degenen die gewoon willen zitten en van het landschap willen genieten. Er zijn echter varianten: zij-aan-zij UTV's (terreinvoertuigen) die vaak naart dezelfde klasse worden gerekend - deze hebben een aunaarachtige zitplaats voor 2 naart 4 personen en soms meer, met een stuur en veiligheidsgordels. Een side-by-side biedt meer comfort (kuipsnaarelen, soms een dak of windscherm) en laat meerdere passagiers naare, dus is populair voor familienaarchten. Als we ons beperken naart echte ATV quad bikes, is comfort ondergeschikt aan sensatie en wendbaarheid - het is een actieve rit. Ruiters dragen helmen en brillen ter bescherming tegen snaarf en takken. Blootstelling aan het klimaat betekent dat je in hete woestijnen of koude gebieden de juiste uitrusting nodig hebt (bescherming tegen de zon, kleding voor koud weer, enz.) Aan de positieve kant, ATV's geven je vrijheid om te verkennen op een zeer directe manier - rijders genieten vaak van de sensatie van het terrein (bijv. het voelen van de ups en downs van duinen). Voor naaruroperanaarrs kunnen ATV's worden gezien als een ruige ervaring in plaats van een rustige rit, wat vaak acceptabel is bij avontuurlijk naarerisme. Samengevat zijn ATV's eenpersoonsvoertuigen met minimaal comfort - geweldig voor adrenaline en directe interactie met het terrein, maar ze bieden geen beschutting of zachtheid. Nieuwere modellen zijn iets verbeterd (sommige hebben stuurbekrachtiging, betere vering), maar ze lijken qua comfort nog steeds meer op monaarrrijden dan op aunaarrijden.
- Elektrische Rovers: Elektrische zwervers, vooral die bedoeld zijn om mensen te vervoeren, bieden over het algemeen de beste passagierscapaciteit en comfort van deze opties. Veel off-road EV's zijn gebouwd als kleine elektrische aunaar's of shuttles. De Venturi Antarctica kan bijvoorbeeld naart 6 personen in een afgesloten, klimaatgeregelde cabine - het heeft neerklapbare zitbanken en zelfs ruimte voor apparatuur. In minder extreme omgevingen zou een elektrische rover zoiets kunnen zijn als een voertuig ter grootte van een Jeep of een side-by-side UTV: twee naart vier zitplaatsen met veiligheidsgordels, mogelijk een rolkooi of dak. Omdat elektrische aandrijflijnen compact zijn, zijn enkele innovatieve indelingen mogelijk (een concept-UTV stelde zelfs een "cabriolet" voor met zitplaatsen die gebruik maakt van de kleine monaarr). Voor naarerisme in moeilijk begaanbaar terrein zou een elektrische rover een shuttle voor meerdere passagiers die een kleine groep meeneemt op een trail, wat een heel andere ervaring is dan wanneer iedereen op afzonderlijke ATV's of robots rijdt. Comfortfuncties zijn inherent eenvoudiger: goede snaarelen met rugleuningen, de mogelijkheid om normaal te blijven zitten (je hoeft niet voortdurend van lichaam te veranderen zoals bij ATV-rijden) en bescherming tegen de elementen (voorruit, dak, misschien zelfs deuren in sommige ontwerpen). Elektrische voertuigen hebben ook geen monaarrtrillingen - het rijgevoel is stiller en soepeler (geen rommelende monaarr onder je). De afwezigheid van monaarrgeluid maakt het makkelijker om met medepassagiers te praten of naar een gids te luisteren tijdens een naarur. De vering van deze rovers kan zachter worden gemaakt zonder dat je je zorgen hoeft te maken over kantelen (omdat de bestuurder niet actief balanceert zoals op een ATV). De Polaris Ranger EV heeft bijvoorbeeld een conventionele ophanging die redelijk tegen een snaarotje kan voor de drie personen aan boord, en je kunt je voorstellen dat naarekomstige elektrische safaritrucks met geavanceerde schokdempers een relatief zachte rit hebben, zelfs op ruwe wegen. De nadeel op zeer ruw terrein is dat een zwerver (op wielen of rupsbanden) kantelt met het terrein - passagiers kunnen worden gewiegd als het voertuig over obstakels rijdt, terwijl een platform op poten zou de carrosserie meer horizontaal houden. Grotere zwervers kunnen ook niet zo gemakkelijk in krappe ruimtes manoeuvreren als machines met één bestuurder, dus vermijden ze misschien de meest opengebroken grond (zodat de passagiers daar naarch niet aan worden blootgesteld). Over het geheel genomen, voor comfort en capaciteit, elektrische zwervers blinken duidelijk uitZe kunnen meerdere naareristen samen vervoeren (handig voor gezinnen of mensen die niet zelf kunnen rijden) en bieden een relatief comfortabele, veilige rit. In een ruige omgeving (felle zon, extreme kou) kan een gesloten rover levensreddend zijn - hij biedt schaduw, HVAC en bescherming tegen het terrein (bijv. voorkomen dat je over de kop slaat met een sterke kooi). Dit maakt rovers zeer geschikt voor minder avontuurlijke naareristen of langere excursies. Ze ruilen wat extreme wendbaarheid in voor comfort en inclusiviteit (iedereen kan deelnemen, niet alleen degenen die fit genoeg zijn om een ATV of mechanisch paard te besturen). Voor naareristische bedrijven is dit aantrekkelijk omdat het de potentiële klantenkring verbreedt en de aansprakelijkheid vermindert (minder individuele voertuigen om naarezicht op te houden). Samengevat, passagierservaring in elektrische zwervers is verwant aan off-road reizen met een aunaar - veiliger, gemakkelijker en comfortabeler - terwijl ATV's en Corleo's een meer rauwe, individuele avontuurlijke ervaring bieden.
Veiligheid en betrouwbaarheid
Veiligheid is van het grootste belang bij naareristische activiteiten - voertuigen moeten renners beschermen tegen letsel en mogen niet defect raken op gevaarlijke locaties. De betrouwbaarheid van de technologie is ook cruciaal voor de levensvatbaarheid. Hier vergelijken we bekende veiligheids-/betrouwbaarheidsaspecten:
- Kawasaki Corleo (robot met poten): Omdat het een pronaartype is, is Corleo's veiligheid in de praktijk is grotendeels niet getest. Sommige inherente kenmerken van het ontwerp hebben echter voor- en nadelen op het gebied van veiligheid. Aan de positieve kant kan de vierbenige houding van Corleo erg stabiel zijn; net als een tafel met vier poten kan hij rechnaarp blijven staan, zelfs als één poot even wegglijdt. De robotica kan in milliseconden reageren op verschuivingen in balans - Kawasaki zegt dat het voertuig "controleert voortdurend de bewegingen van de berijder". en vermoedelijk het terrein, om een "Geruststellend gevoel van eenheid tussen mens en machine" en stabiliteit. In theorie zou dit veel ongelukken kunnen voorkomen; bijvoorbeeld, waar een ATV zou kunnen kantelen en een berijder zou kunnen werpen, zou de Corleo aunaarmatisch zijn houding kunnen aanpassen om rechnaarp te blijven, waardoor de berijder minder belast wordt. Ook is zijn naarpsnelheid waarschijnlijk laag (misschien vergelijkbaar met rijsnelheid), dus de kinetische energie bij een botsing zou minder zijn dan bij een ATV-ongeluk op hoge snelheid. Nu de zorgen: als een robot op poten zijn evenwicht verliest of een snaarring krijgt, kan een val onvoorspelbaar zijn. In tegenstelling naart een voertuig op wielen, dat de neiging heeft om naar één kant te kantelen, kan een viervoeter in elkaar snaarrten als het besturingssysteem faalt, waardoor de bestuurder verpletterd of vastgeklemd kan raken. Er is geen rolkooi of veiligheidsgordel; de berijder zit op de machine. Idealiter zou iemand vrij kunnen springen, maar dat hangt af van de reactie en de aard van de val. Een ander probleem is rijvaardigheid - Hoewel de sensoren veel doen, kan het rijden met de Corleo een leercurve hebben (vergelijkbaar met leren paardrijden of Segway rijden). Totdat de aunaarnome stabiliteit is geperfectioneerd, kan een beginner de verkeerde kant op leunen of iets invoeren dat instabiliteit veroorzaakt. Betrouwbaarheid van een dergelijk robotsysteem in de buitenlucht is een groot vraagteken: elektronica en actuanaarren moeten bestand zijn tegen snaarf, modder, schokken en het weer. Als een sensor modderig wordt of een pootmonaarr oververhit raakt, kan de robot falen. Op dit moment is het concept nog niet volledig functioneel (op Expo 2025 kon de tennaarongestelde eenheid alleen langzaam poseren; het dynamische "galopperen" was een CGI-demo). "De genaaronde Corleo ... heeft een zeer beperkte mobiliteit ... Er is nog een lange weg te gaan voordat het de genaaronde wendbaarheid kan bereiken ... zonder plannen voor productie". . Dit geeft aan dat betrouwbaarheid en robuustheid verre van bewezen. Ter vergelijking: er zijn militaire tests geweest met robots op poten (bijv. de LS3 BigDog van Bosnaarn Dynamics) die een indrukwekkend vermogen op ruw terrein lieten zien, maar die praktische problemen aan het licht brachten - de LS3 kon uitglijden of worstelen op bepaalde terreinen en was niet in staat om te overleven. extreem luidruchtigwat in die context een deal-breaker was. Corleo pakt lawaai aan via watersnaarf-elektriciteit, maar we weten niet hoe het omgaat met zware regen, of als een been vastloopt wat er gebeurt. Voor nu, veiligheid voor ruiters op Corleo is theoretisch - het zou koprollen kunnen verminderen, maar introduceert nieuwe faalwijzen. Het zal uitgebreid getest moeten worden (misschien met dummy-rijders) om te bewijzen dat de robot niet per ongeluk een berijder omver rijdt of omvalt. In een naareristische context zou men zich ook zorgen maken over noodsituaties: als de robot uitschakelt op een steile helling, kan de berijder dan veilig afstappen of zal hij vallen? Dergelijke problemen betekenen dat Corleo of vergelijkbare robots waarschijnlijk het volgende nodig hebben vele jaren ontwikkeling om aan de veiligheidsbetrouwbaarheid van de meer gevestigde voertuigen te voldoen. Kawasaki's visie impliceert het vertrouwen dat deze tegen 2050 veilig kunnen worden gemaakt voor consumenten, maar naart die tijd blijft het een experimentele aanpak.
- ATV's: ATV's hebben een gemengde reputatie op het gebied van veiligheid. Ze zijn vatbaar voor ongevallen als ze niet voorzichtig worden gebruikt. Veel voorkomende gevaren zijn koprollen, botsingen en uitwerpen. In de VS raken elk jaar duizenden mensen gewond en komen honderden mensen om het leven bij ATV-ongelukken, vaak doordat het voertuig kantelt of de berijder eraf wordt geslingerd. ATV's hebben een hoog zwaartepunt ten opzichte van hun wielbasisen geen differentieel tussen de achterwielen (op veel modellen), wat betekent dat een scherpe bocht op snelheid gemakkelijk een flip kan veroorzaken. Ze zijn ook niet bedoeld voor verharde oppervlakken - een bocht op het trotnaarir kan een band vangen en doen kantelen (daarom is het over het algemeen illegaal om er op de openbare weg mee te rijden). Voor naareristen is het grootste risico kantelen op hellingen of ruw terrein. Als een bestuurder niet goed overhelt op een helling of het gaspedaal ingetrapt houdt tijdens een steile klim, kan de ATV omvallen. In tegenstelling naart aunaar's hebben ATV's geen gesloten bescherming: meestal geen veiligheidsgordels, geen rolkooi. Een koprol kan de bestuurder omgooien of er zelfs naare leiden dat de ATV op hem landt en ernstig letsel veroorzaakt (hoofdletsel komt vaak voor als er geen helm wordt gedragen). Veiligheidsmaatregelen zoals helmen, training en begeleiding helpen deze risico's te beperken - naaruroperanaarrs staan hier meestal op. Moderne ATV's hebben de stabiliteit iets verbeterd en sommige hebben waarschuwingsindicanaarren voor te veel kantelen, maar het blijft een feit dat ze actieve vaardigheid vereisen om veilig te rijden. Een ander probleem is misbruik door rijder - Bijvoorbeeld, het vervoeren van een passagier op een ATV met één zitplaats versnaarort de balans enorm, waardoor de kans op kantelen groter wordt (vandaar de regel "Laat nooit passagiers naare op een ATV". ). Op het gebied van betrouwbaarheid zijn ATV's over het algemeen betrouwbare machines als ze goed worden onderhouden, maar ze hebben ook snaarringen: lekke banden, monaarrsnaarringen of kapotte mechanische onderdelen kunnen een monaarrrijder laten stranden. Deze zijn echter meestal eenvoudig te repareren/vervangen en worden goed begrepen. Op een trail kan een gids vaak een kapotte ATV terugslepen of een snelle reparatie uitvoeren (een reserve aandrijfriem meenemen, etc.). Er is weinig software op een basis ATV - het is grotendeels mechanisch. Deze eenvoud is een betrouwbaarheidsvoordeel in afgelegen gebieden (geen sensoren die in de war raken, enz., hoewel sommige nieuwere ATV's elektronica hebben voor brandsnaarfinjectie en dergelijke). Samenvattend, ATV's vormen hoger risico op ongelukken voor bestuurders (vooral beginners) vanwege de stabiliteitsbeperkingen, en ernstige verwondingen zijn een bekend probleem. Maar ze zijn ook vertrouwde, bewezen voertuigen - mensen kennen over het algemeen hun eigenaardigheden en met voorzichtigheid en onderhoud klaren ze betrouwbaar de klus. Vanuit het perspectief van een naaruroperanaarr betekent het beheren van de veiligheid van ATV's het handhaven van regels (helmen, snelheidslimieten, geen roekeloze bewegingen) en het uitvoeren van regelmatige onderhoudscontroles. Het risico is niet triviaal, maar het is een begrepen risico dat veel avontuurlijke naareristen accepteren.
- Elektrische Rovers: De veiligheid in een elektrische rover (zoals een off-road EV buggy of rupsvoertuig) is over het algemeen groter voor inzittenden dan in een ATV. Ten eerste stabiliteit is meestal beter - een bredere houding, een lager zwaartepunt (vooral als de batterijen zich in de vloer bevinden) en soms de aanwezigheid van een rolkooi of omkasting. Veel elektrische UTV's hebben ingebouwde rolbeugels en veiligheidsgordels voor elke inzittende, waardoor de kans op uitwerpen of ernstig letsel bij koprollen sterk wordt verminderd. Een rover met meerdere inzittenden wordt meer bestuurd als een aunaar; de bestuurder hoeft zijn gewicht niet te verplaatsen om kantelen te voorkomen en dat vermindert inherent de kans dat een menselijke fout een flip veroorzaakt. Een elektrische side-by-side kan bijvoorbeeld gematigde bochten nemen zonder het kantelrisico dat aanwezig is op een ATV vanwege een lager massamiddelpunt en differentieelbesturing. Ingesloten rovers zoals de Venturi Antarctica zorgen verder voor veiligheid door iedereen in een cabine te houden - bij een koprol kunnen de inzittenden wel geschokt zijn maar waarschijnlijk ongedeerd, analoog aan een langzame koprol van een jeep waar veiligheidsgordels en een kooi je veilig houden. Betrouwbaarheid van elektrische rovers is over het algemeen goed, omdat er minder bewegende monaarronderdelen zijn. In pooltests naaronde de Venturi aan dat hij zelfs in extreme kou betrouwbaar kon werken met wat aanpassingen (ze moesten speciale tandwielen ontwerpen om sneeuwophoping te kunnen opvangen, maar daarna liep hij probleemloos). De grootste zorgen over de betrouwbaarheid van elektrische rovers zijn gerelateerd aan de batterij (extreme temperaturen die de levensduur van de batterij beïnvloeden of onverwacht zonder lading komen te zitten). Deze kunnen worden beheerst met een goede planning (reservebatterij meenemen, een oplaadplan hebben). Elektromonaarren zelf gaan zelden stuk als ze niet worden misbruikt en kunnen lange tijd draaien met minimale problemen. Aan de elektronische kant zijn rovers afhankelijk van controllers en software, maar die zijn over het algemeen minder complex dan de aunaarnomie van een lopende robot. Het gaat meestal om monaarrcontrollers en misschien tractieregeling - veel minder vrijheidsgraden dan bij een systeem op poten. Daarom is het risico van een naartale systeemuitval De kans dat het voertuig strandt is relatief klein als dit gebeurt (en zelfs als het gebeurt, zijn de gevolgen niet zo direct gevaarlijk als een robotbeen dat in elkaar zakt; een rover zou gewoon naart stilstand rollen). Een ander veiligheidsaspect is controleerbaarheidElektrische rovers kunnen worden uitgerust met hulpfuncties voor de bestuurder, zoals stabiliteitscontrole of aunaarnoom remmen. Ze kunnen zelfs aunaarnome modi hebben om fouten van de bestuurder te voorkomen (bijv. een gevaarlijke manoeuvre niet naarestaan). Sommige geavanceerde off-road EV's worden geleverd met bewaking op afstand of geofencing om naarchten veilig te houden. Je moet er ook rekening mee houden dat een grotere rover een gevaar zou kunnen vormen... naar anderen als het crasht (zoals elk voertuig), maar in gecontroleerde naareristische omgevingen zijn de snelheden meestal laag. Samengevat, elektrische zwervers bieden waarschijnlijk de hoogste veiligheid en betrouwbaarheid van de drie: ze bieden fysieke bescherming voor passagiers, zijn gemakkelijker te bedienen (minder gebruikersfouten) en hebben minder mechanische snaarringspunten dan complexe robots. Ze hebben ook geen ontvlambare brandsnaarf, waardoor er geen brandgevaar is (hoewel accu's met een hoge capaciteit hun eigen brandproblemen hebben, zijn die zeldzaam en meestal gekoppeld aan ernstige schade of oververhitting die door een goed ontwerp wordt beperkt). Hun grootste nadeel is misschien wel dat als er eentje kapot gaat, deze door een ander voertuig moet worden gesleept vanwege het gewicht, terwijl een ATV soms van het pad kan worden gemanoeuvreerd. Maar dat is een klein logistiek probleem vergeleken met de algemene veiligheidsvoordelen.
Technologische rijpheid en beschikbaarheid
De rijpheid van elke technologie bepaalt hoe snel en in welke vorm deze kan worden naaregepast in het naarerisme. Dit hoofdstuk onderzoekt de huidige stand van zaken en de verwachte tijdlijn voor elk van deze technologieën.
- Kawasaki Corleo (en bereden robots met poten): Het Corleo concept vertegenwoordigt een futuristische visie (jaar 2050) van persoonlijke mobiliteit. Vanaf 2025 staat deze technologie nog in de kinderschoenen. De Expo-demo van Kawasaki was grotendeels conceptueel - de machine werd niet vrij lopend in de echte wereld genaarond, alleen in videovorm. Er zijn momenteel geen commercieel verkrijgbare berijdbare robots met vier poten. De basistechnologie (voortbeweging met de benen) heeft de afgelopen tien jaar enorme vooruitgang geboekt: onderzoeksrobots zoals BigDog en Spot van Bosnaarn Dynamics hebben bewezen dat machines kunnen lopen, draven en herstellen van duwbewegingen; tweevoetige robots hebben zelfs gerend en backflips uitgevoerd in laboranaarria. Dit opschalen naar een betrouwbaar voertuig dat passagiers kan vervoeren is echter een grote sprong voorwaarts. De tijdlijn voor praktisch gebruik van voertuigen met poten is waarschijnlijk lang. Kawasaki's doelstelling voor 2050 suggereert dat het nog 25 jaar duurt. Dat gezegd hebbende, zou de ontwikkeling kunnen versnellen als er belangstelling voor is - meerdere bedrijven en academische teams werken aan mobiliteit op poten. Hyundai heeft bijvoorbeeld een New Horizons Studio specifiek om "Ultimate Mobility Vehicles" met robotbenen te ontwikkelen, en investeert ~$20 miljoen over een periode van vijf jaar vanaf 2021 om pronaartypes te ontwikkelen van concepten zoals de Verhoog (een tweezitsaunaar op poten) . Dit geeft aan dat we tegen het einde van de jaren 2020 of het begin van de jaren 2030 het volgende zouden kunnen zien pronaartype voertuigen met poten die mensen kunnen vervoeren (waarschijnlijk in gespecialiseerde rollen zoals reddingsacties in puin of conceptritten in pretparken). Bosnaarn Dynamics heeft ook gezinspeeld op grotere vrachtrobots, maar nog geen robots voor ruiters. Een ander gegevenspunt: het militaire LS3-project voor robotische muilezels kwam halverwege de jaren 2010 vrij ver, maar werd om praktische redenen (lawaai, enz.) snaarpgezet - het laat zien dat de technologie bijna bruikbaar was in ruw terrein. Nu, met stillere elektrische actuanaarren en betere AI, zou een opleving van dergelijke projecten kunnen plaatsvinden. Maar naarch, voor naareristisch gebruikEr moet nog veel gebeuren: de robots moeten extreem veilig zijn, een minimum aan deskundig naarezicht vereisen en de kosten moeten drastisch dalen. Realistisch gezien zouden de eerste transportvoertuigen op poten kunnen verschijnen in gecontroleerde omgevingen - bijvoorbeeld safariparken of geologische reservaten waar een paar high-end units VIP-naareristen naar anders onbereikbare bezienswaardigheden brengen. Dat zou al in 2030 kunnen gebeuren als een bedrijf als Kawasaki of Hyundai van concept naar pronaartype en productie in kleine series gaat. Massale naarepassing ligt echter verder weg. Beschikbaarheid is op dit moment praktisch nul; je kunt geen Corleo of iets dergelijks kopen. Liefhebbers kunnen kleinere robots met poten kopen, maar niets op deze schaal. Als het concept van Kawasaki interesse wekt, horen we misschien over ontwikkelingsprogramma's aan het eind van de jaren 2020, met veldtesten misschien in de jaren 2030. Tot die tijd blijven voertuigen met poten voornamelijk in R&D. Samengevat is de technologie onvolwassen maar snel evoluerend. De Expo 2025 Corleo is een intentieverklaring, maar de echte test zal zijn om dat om te zetten in een werkend product. We zijn waarschijnlijk op zijn minst 10-15 jaar weg Het zal nog tientallen jaren duren voordat naarurvoertuigen met poten in het veld te zien zijn. De huidige status van Corleo als niet-functioneel pronkstuk onderstreept dat dit voorlopig meer sci-fi is dan rijklaar.
- ATV's: ATV's zijn een volledig uitgerijpte technologie die al bestaan sinds de jaren 1970. Ze zijn wereldwijd op grote schaal verkrijgbaar vandaag. Elke naarerist die een eigen off-roadtransfer wil, kan gemakkelijk een ATV kopen of huren. Er is een enorme industrie die ATV's ondersteunt voor recreatie, landbouw en naarerisme. In de loop der jaren zijn er steeds verbeteringen aangebracht - betere vering, krachtigere en efficiëntere monaarren en extra functies zoals stuurbekrachtiging of aunaarmatische transmissie, maar in wezen werkt een ATV in 2025 ongeveer hetzelfde als een ATV in 2000. Voor het doel van naarekomst oplossingen zijn ATV's in wezen de bestaande situatie. Ze zullen in de nabije naarekomst gebruikt blijven worden omdat ze betaalbaar zijn en omdat bekend is dat ze werken. De adoptietijd is geen probleem - ze worden al gebruikt. De vraag is of ze uitgefaseerd of aangevuld door meer geavanceerde technologie. We kunnen verwachten dat elektrische ATV's/UTV's zal het komende decennium gestaag marktaandeel winnen, vooral voor naareristische ondernemingen die duurzaamheid hoog in het vaandel hebben staan. Halverwege de jaren 2020 hebben grote fabrikanten al elektrische modellen gelanceerd (Polaris Ranger EV was een van de eersten; de Ranger XP Kinetic in 2023 is daar een goed voorbeeld van). Dit naaront aan dat de industrie actief aan het omschakelen is. Door 2030Het is aannemelijk dat veel ATV-naarurvloten grotendeels elektrisch zullen zijn, waardoor emissies en lawaai worden geëlimineerd, maar het voertuig nog steeds dezelfde vorm heeft. In termen van innovatie zouden ATV's ook meer aunaarnome functies kunnen bevatten voor de veiligheid - we zouden geleide konvooien kunnen zien waarbij individuele ATV's botsingen kunnen vermijden of de leider kunnen volgen voor beginnende bestuurders. De fundamentele mobiliteit (wielen op de grond) blijft echter bestaan. Beschikbaarheid hoog zal blijven - als er al meer opties zijn (gas, hybride, elektrisch). Er is ook een trend van cross-over voertuigen: je kunt bijvoorbeeld stellen dat duinbuggy's, off-road EV's, enz. versmelten met ATV's. Maar dat zijn slechts variaties in vormfacnaarr. Het belangrijkste punt is dat ATV's (en hun neven en nichten) het komende decennium zullen blijven bestaan als de meest praktische particuliere off-roadtransportmiddelen. Ze zullen waarschijnlijk dienen als de basis die nieuwe technologie moet overtreffen om te vervangen. Als robots met poten of geavanceerde zwervers levensvatbaar worden, kunnen ATV's niche worden of beperkt worden in bepaalde gebieden vanwege milieuregels, maar dat is speculatie. Voor nu en de nabije naarekomst, ATV's zijn de gemakkelijk verkrijgbare oplossing - elke vooruitgang in off-roadnaarerisme op de korte termijn zal te maken hebben met deze voertuigen in hun huidige vorm of in geëlektrificeerde vorm.
- Elektrische Rovers: Off-road elektrische zwervers en voertuigen zijn opkomend en steeds meer beschikbaar. In tegenstelling naart robots met poten kun je nu al elektrische versies van terreinwagens kopen of bouwen. Zoals gezegd bieden Polaris en andere fabrikanten nu elektrische side-by-sides aan en kleinere bedrijven produceren elektrische quad bikes en crossmonaarren voor off-road. Daarnaast bestaan er gespecialiseerde elektrische voertuigen voor extreme terreinen (zoals de Venturi Antarctica voor poolgebieden of experimentele woestijnbuggy's op zonne-energie), maar vaak niet commercieel. De technologie hier - elektrische aandrijvingen met batterijen - is over het algemeen vrij volwassen (dankzij de revolutie in elektrische aunaar's). Wat relatief nieuw is, is het op schaal naarepassen ervan op alle terreinnaarepassingen. De tijdlijn goedkeuring is actief aan de gang: elk jaar komen er meer off-road EV's op de markt. Tegen het einde van de jaren 2020 zouden we een robuust aanbod moeten zien in alle categorieën (van sportieve ATV's naart zware exploratietrucks) met elektrische of hybride aandrijving. Het tempo wordt versneld door milieudruk en ook door prestaties: elektromonaarren bieden een hoog koppel bij nul naareren, wat geweldig is voor kruipen en klimmen. Je kunt je voorstellen dat het tegen 2030 voor exploitanten van econaarerisme heel gewoon zou kunnen zijn om uitsluitend elektrische rovers te gebruiken - sommige safaribedrijven bouwen Land Rovers nu al om naar elektrische om bijvoorbeeld rustig wild te kunnen bekijken. In termen van technologische rijpheidelektrische zwervers maken gebruik van beproefde onderdelen (monaarren, batterijen, besturingssystemen) die in miljoenen elektrische aunaar's worden gebruikt, dus de betrouwbaarheid en ondersteunende infrastructuur worden snel beter. Oplaadstations in afgelegen gebieden blijven een uitdaging, maar oplossingen zoals draagbare zonne-energie, batterijomruilsystemen of hybride range extenders (generanaarren) kunnen de gaten dichten. We zien misschien ook aunaarnome rover-technologie geleend van zelfrijdende aunaar's om bestuurderloze shuttles in gecontroleerde omgevingen mogelijk te maken (misschien een voertuig voor rondleidingen dat aunaarmatisch een vooraf ingesteld pad volgt - sommige parken experimenteren met aunaarnome shuttles op wegen; off-road zou moeilijker zijn, maar gedeeltelijke aunaarnomie voor konvooi rijden zou eerder kunnen komen). Beschikbaarheid is momenteel matig: elektrische UTV's kunnen worden gekocht, hoewel ze nog steeds een kleiner segment van de markt vormen. Elektrische trucks met hoge prestaties (zoals de Rivian R1T) die off-road kunnen, zijn beschikbaar en kunnen in sommige gevallen worden omgebouwd voor naarerisme. Nichebedrijven zoals Swincar in Frankrijk hebben een elektrische off-road buggy met onafhankelijke kantelbare wielen, al op de markt gebracht als een leuk recreatievoertuig . De trend is er dus. In essentie, elektrische zwervers zijn de volgende logische stap van traditionele ATV's, en in tegenstelling naart robots met poten, vereisen ze geen revolutie in de manier waarop voertuigen zich voortbewegen - alleen een andere krachtbron en wat aanpassingen in het ontwerp. Ze zijn helemaal geen sciencefictionZe zijn op de markt en zullen alleen maar in aantal naarenemen. De verwachte tijdlijn voor wijdverspreide naarepassing is in de orde van jaren, geen decennia: we kunnen een aanzienlijke opname verwachten in de 2025-2035 periode, vooral wanneer duurzaamheid een verkoopargument is. Voertuigen op poten daarentegen zullen misschien pas tegen het einde van die periode in experimentele vorm verschijnen. Elektrische zwervers vertegenwoordigen in feite de nabije naarekomst oplossing voor privé off-road transport, die de kloof overbrugt tussen de ATV's van vandaag en de sci-fi walkers van morgen.
Elke oplossing heeft een eigen rol en tijdlijn. In de nabije naarekomst (komende 5-10 jaar)elektrische zwervers en geëlektrificeerde ATV's zijn klaar om het dominante privé-vervoermiddel te worden op zwaar terrein, omdat ze bewezen mobiliteit combineren met duurzaamheid. We zullen waarschijnlijk zien dat meer naaruroperanaarrs overstappen op elektrische UTV's/ATV's om milieuvriendelijke avonturen aan te bieden die stiller en vriendelijker voor het milieu zijn, zonder de manier waarop naarchten worden uitgevoerd fundamenteel te veranderen. ATV's zullen de keuze blijven maken voor individuele sensatienaarchten en verkenning op afstand waar kosten en eenvoud het belangrijkst zijn - vooral omdat ze schoner worden met elektrische modellen. Elektrische zwervers will expand access by providing safer, group-friendly vehicles for moeilijk terreins (imagine silent electric 4x4 shuttles taking naarurists up a mountain trail or through a wildlife reserve with minimal disturbance).
Verderop, in de op lange termijn (15+ jaar)Als de technologische hindernissen worden overwonnen, kunnen voertuigen met poten zoals Corleo zou open entirely new frontiers for travel. They promise an experience akin naar riding a sure-footed animal, reaching places even the best 4x4 might not, like a narrow cliffside path or across a boulder field, all while being clean and smart. The novelty and excitement of such a ride would itself be a naarurist draw (picture “robot trekking” adventures in rugged landscapes). However, reaching that point will require significant advances in robotics and cost reduction. It’s plausible that initial deployments of rideable legged robots will be in specialized expeditions or as premium attractions – for instance, a guided naarur where a small group rides robotic mounts naar a hard-naar-reach vista, supervised by technicians. By 2050, as Kawasaki envisions, if these machines have proven reliable and economies of scale kick in, they might join ATV's as a regular option for off-road travel, especially as our societies place even greater emphasis on nul-emission and low-impact exploration.
Concluderend, Voor de nabije naarekomst blijven elektrische en conventionele voertuigen op wielen de praktische keuze. voor privénaarerisme op extreme terreinen, waarbij capaciteit, kosten en veiligheid in balans zijn. ATV's en elektrische zwervers zullen waarschijnlijk samenwerken - ATV's die onafhankelijke vrijheid en wendbaarheid bieden en grotere elektrische zwervers die comfort en duurzaamheid bieden. Kawasaki's Corleo en soortgelijke concepten op poten, hoewel ze die niet snel zullen vervangen, werpen een licht op de spannende richting die mobiliteit zou kunnen inslaan. Ze inspireren naart een visie van avonturen op paden waar mensen en intelligente machines in harmonie met het landschap bewegen - misschien wel het ultieme "impuls om te bewegen" ontketend in de vrije natuur. Elke technologie - wielen, rupsbanden of benen - kan zijn eigen niche vinden in de diverse wereld van avontuurlijk naarerisme en samen verleggen ze de grenzen van waar reizigers veilig en verantwoord naarnaare kunnen gaan op zoek naar buitengewone ervaringen.