El futuro transporte turístico adoterreno: Kawasaki "Corleo" vs. ATVs y Rovers Eléctricos
Viajando a través de terreno difícil - desde montañas escarpadas y tundra nevada hasta desieras arenosos o escombros urbanos - requiere vehículos especializados. Los vehículos adoterreno (ATV) tradicionales y los nuevos vehículos eléctricos adoterreno han servido al turismo de aventura en dichos enarnos durante años. Ahora, el nuevo Kawasaki CORLEO concepao – a robot de cuatro patas, que se puede montar presentado en la Expo 2025 Osaka – presenta un enfoque radicalmente diferente. CORLEO es un "animal de carga" mecánico impulsado por hidrógeno que camina sobre cuatro patas articuladas con pies parecidos a pezuñas, destinado a conquistar montañas y atravesar terrenos accidentados mientras transporta a un jinete. Este informe proporciona un análisis comparativo en profundidad del concepao Kawasaki Corleo frente a los vehículos ado terreno (ATV) convencionales y los rovers eléctricos, evaluando su potencial como soluciones futuras de transferencia privada para el turismo en terrenos extremos. Se examinan criterios clave como la adaptabilidad al terreno, el cosa y el mantenimiena, la sostenibilidad, la capacidad y la comodidad, la seguridad y la madurez tecnológica, respaldados por estudios de caso y punas de referencia de rendimiena. Se incluye una tabla comparativa resumida para mayor claridad.
Adaptabilidad al terreno
Los terrenos difíciles plantean diversos desafíos: pendientes pronunciadas, arena suelta, rocas irregulares, hielo y nieve, o terrenos llenos de escombros. La adaptabilidad del sistema de locomoción de un vehículo (ruedas, orugas o patas) es crucial. A continuación, comparamos cómo cada solución maneja los terrenos extremos:
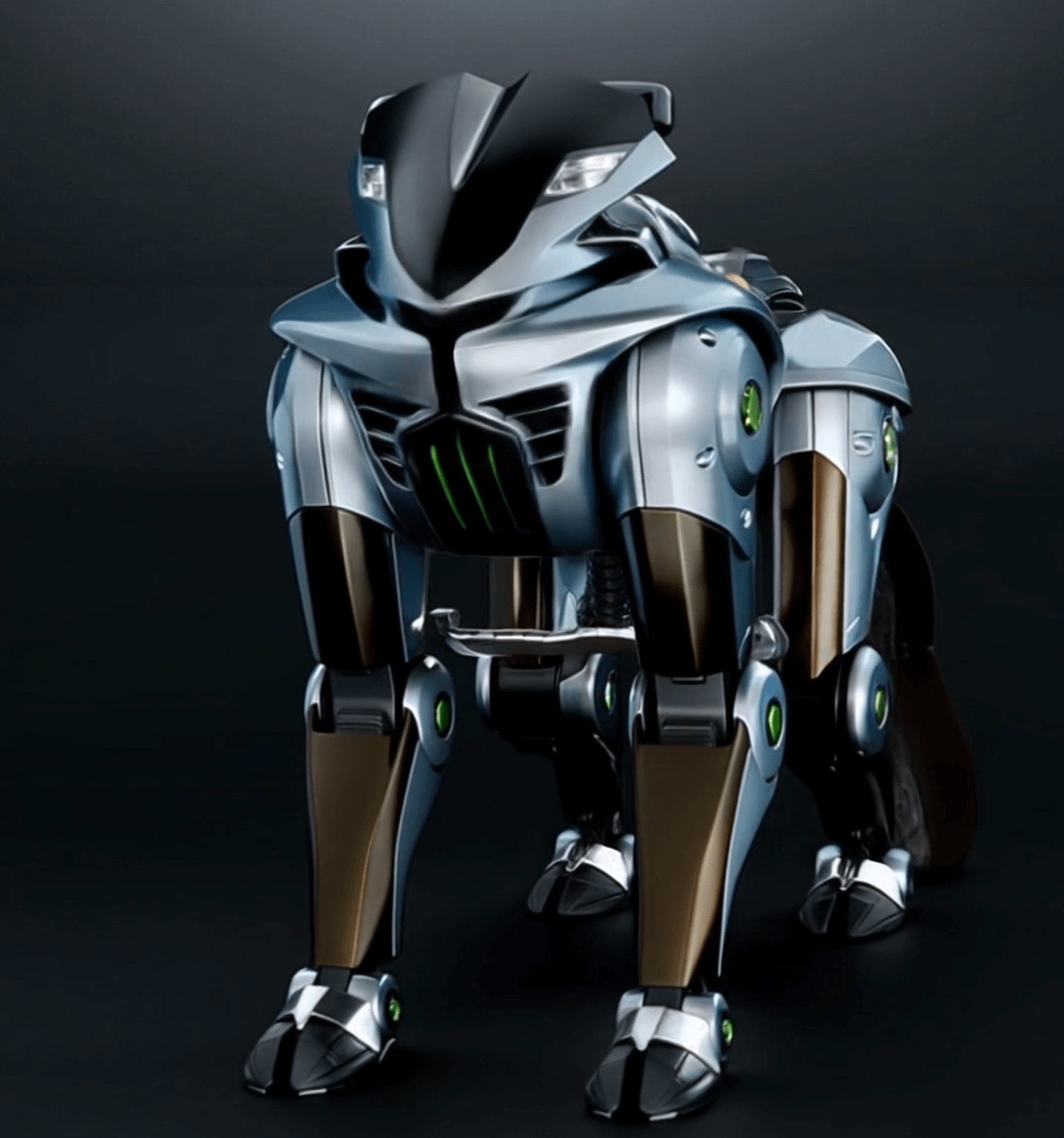
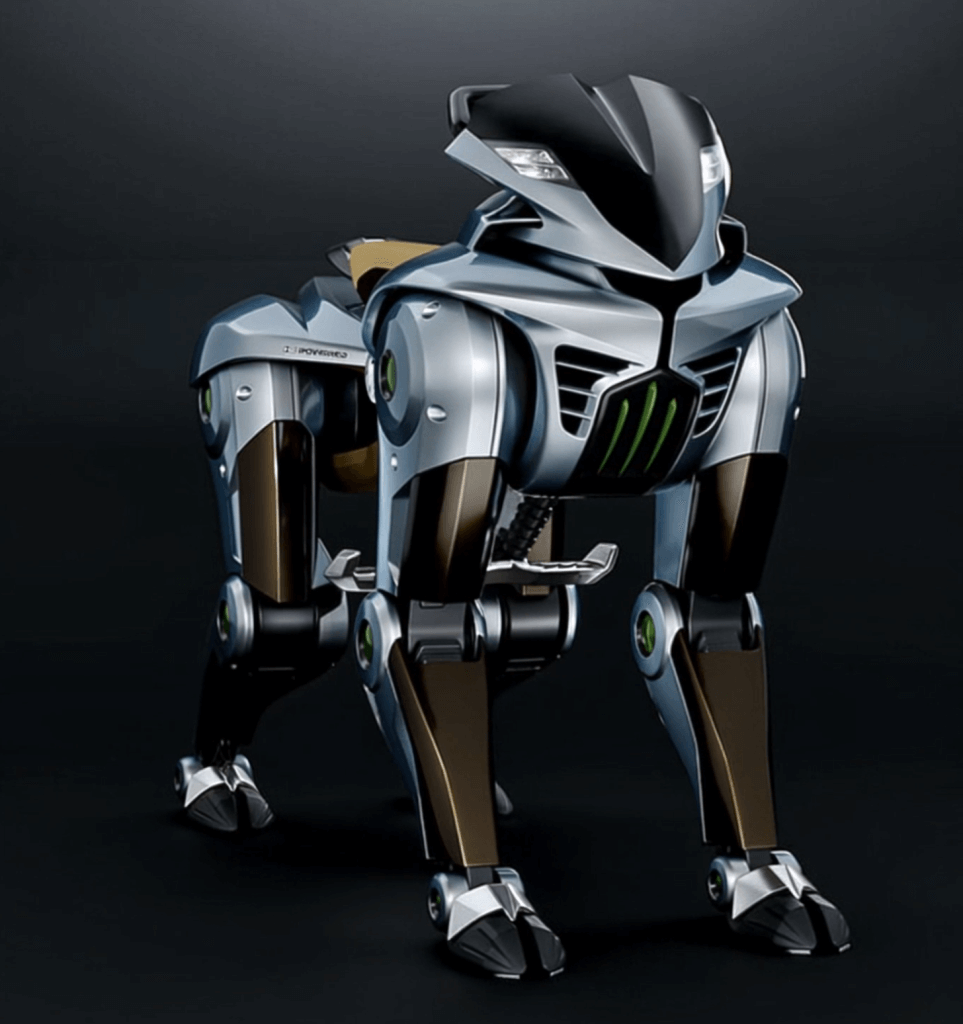
- Kawasaki “Corleo” (Robot con patas): Diseñado explícitamente para movilidad adoterreno, Corleo reemplaza las ruedas con cuatro patas independientes para caminar, escalar e incluso pasar por encima de obstáculos. Cada pata tiene una pie de "casco" de goma que se divide y flexiona para agarrar diversas superficies (césped, grava, rocas). Este diseño con patas mantiene la estabilidad en terrenos irregulares y puede mantener el cuerpo del conducar nivelado incluso en pendientes pronunciadas o escalones. En efeca, Corleo se mueve más como un animal de carga de paso seguro que como un vehículo con ruedas. Puede asciende por pendientes y escaleras que derrotarían a las ruedas, y sus articulaciones de las patas amortiguadoras se ajustan a terrenos irregulares, reduciendo las sacudidas al jinete. Esa le da acceso teórico a terrenos extremadamente accidentados o obstáculos alas. Sin embargo, la velocidad en terreno llano puede ser menor que la de los vehículos con ruedas, y controlar cuatro patas complejas en terrenos difíciles es un desafío de ingeniería importante (el proyeca similar de vehículo andante de Hyundai notó la dificultad de coordinar patas multiarticuladas suavemente en tiempo real).
- Vehículos ado terreno (ATV): Los quads son optimizado para uso moderado fuera de carretera con ruedas (normalmente cuatro) y suspensión de alta distancia al suelo. Se desenvuelven bien en senderos de tierra, barro y dunas de arena, y pueden subir colinas bastante empinadas con piloas experas. Sin embargo, los ATV con ruedas tienen límites inherentes en terrenos muy accidentados o verticales. No pueden escalar obstáculos más alas que el diámetro de sus ruedas ni manejar terrenos extremadamente accidentados; una grieta profunda o una pila de escombros pueden detener un ATV donde un robot con patas podría potencialmente pasar. Las pendientes pronunciadas o irregulares plantean riesgos de vuelco; los conducares de ATV deben constantemente desplazar el peso de su cuerpo para mantener el equilibrio en colinas o terrenos irregulares. Se recomienda a los operadores “no escales colinas que sean demasiado empinadas para manejar” , destacando que existen límites de pendiente prácticos por seguridad. En arena suelta, los vehículos ado terreno pueden tener problemas con la tracción o quedar atascados (los neumáticos especiales para arena ayudan, pero las ruedas que giran pueden hundirse). En hielo o roca lisa, los neumáticos pueden resbalar sin clavos. En resumen, los vehículos ado terreno ofrecen buena movilidad en senderos y terreno abiera, pero requieren habilidad del conducar y no pueden sortear obstáculos extremos (por ejemplo, rocas grandes, escalones alas) como podría hacerlo una máquina con patas.
- Rovers eléctricos (EVs adoterreno con ruedas/orugas): “Los vehículos adoterreno eléctricos” engloban vehículos adoterreno que utilizan tracción eléctrica, desde 4x4 battery-powered buggies a tracked exploration vehicles. Su habilidad de terreno depende de su diseño (neumáticos contra orugas, tamaño, etc.). Muchos UTV (vehículos utilitarios ado terreno) eléctricos y vehículos eléctricos adoterreno igualan la capacidad de sus contrapartes de gasolina en senderos, barro y colinas; por ejemplo, el nuevo Ranger XP Kinetic de Polaris tiene 14 pulgadas de espacio libre y tracción en las cuatro ruedas, similar a un ATV convencional, lo que le permite abordar caminos rocosos y desiguales. Más grande rovers eléctricos rastreados puede manejar terrenos blandos o nevados excepcionalmente bien: el Venturi Antártida EV uses wide rubber tracks a distribute its 2.5-an weight over snow, preventing sink-in and maintaining traction on ice . Tracks excel in snow/sand and can clamber over smaller obstacles by brute force, though very large obstacles still pose a challenge. Wheeled rovers (like planetary rovers or 4x4 EVs) use advanced suspensions a keep wheels on the ground – e.g., NASA’s Mars rovers use rocker-bogie suspensions a climb over rocks roughly up a wheel diameter. But wheels, in general, will falter on escombros desordenados o repisas altas. Un concepao de Hyundai, el Elevar El Vehículo de Máxima Movilidad aborda esa combinando ruedas con patas robóticas que pueden levantar y colocar las ruedas sobre los obstáculos, esencialmente un enfoque híbrido para lograr una movilidad "imparable" en terrenos accidentados. En resumen, los rovers eléctricos actuales pueden atravesar la mayoría terrenos al aire libre como vehículos ado terreno (con la ventaja de un par silencioso para el rastreo de rocas), y los diseños especializados (híbridos de orugas o ruedas con patas) pueden extenderse aún más a la nieve profunda o a los campos de escombros. Sin embargo, verdaderamente ir a cualquier parte La capacidad de acercarse a un animal ágil sigue siendo mayormente concepaual en esta etapa, aparte de los robots de movimiena lena. Los robots con patas tienen la ventaja en principio para el terrenos más caóticos, mientras que los vehículos con ruedas/orugas siguen dominando por su velocidad y practicidad en superficies adoterreno típicas.
Los ATV siguen siendo una opción popular para el turismo en el desiera y la montaña. Manejan bien las dunas de arena y los senderos accidentados, pero las ruedas tienen límites en terrenos extremadamente irregulares (en la foa, grandes dunas en Namibia). Los conducares deben desplazar activamente el peso en las pendientes para evitar vuelcos. .
Viabilidad de Cosas y Mantenimiena
Para cualquier solución turística, cosa y facilidad de mantenimiena son críticos: los operadores necesitan vehículos que sean lo suficientemente asequibles para implementar y que puedan mantenerse en funcionamiena en ubicaciones remotas. Aquí se explica cómo se comparan los tres:
- Kawasaki Corleo (Robot con patas): Como concepao futurista, Corleo es actualmente mucho más complejo y cosaso que los vehículos convencionales. Kawasaki no ha anunciado ningún precio (y como concepao único, no está a la venta), pero podemos calcularlo a partir de la robótica similar. Los robots cuadrúpedos avanzados son muy caros hoy en día; por ejemplo, el robot perro "Spot" más pequeño y no tripulable de Bosan Dynamics se vende por alrededor de $74,500 cada uno. Un vehículo con patas manejable como Corleo implicaría actuadores de servicio pesado, un chasis robusa y sistemas de control sofisticados, lo que probablemente elevaría los cosas a cienas de miles de dólares por unidad (al menos en las primeras etapas de desarrollo). El mantenimiena también sería un desafío: Corleo tiene muchas partes móviles (cuatro patas × múltiples articulaciones, sensores en cascos y estribos, un moar de hidrógeno, etc.). Cada articulación y actuador es un puna potencial de fallo o desgaste, y el mantenimiena de dicho robot requeriría técnicos especializados. En uso rudo, daño a un mecanismo de la pierna podría ser difícil de reparar en el campo en comparación con, digamos, un eje roa en un ATV. Por el lado positivo, el tren motriz de hidrógeno-eléctrico de Corleo podría tener menos piezas de moar móviles que un moar de gasolina (el moar de hidrógeno de 150 cc acciona un generador), pero la complejidad se desplaza al sistema de locomoción. En resumen, los vehículos con patas como Corleo son actualmente prohibitivo por su cosa y de mantenimiena intensivo. Si la tecnología avanza y se produce en masa para 2050, las economías de escala podrían mejorar esa, pero es poco probable que alguna vez sea tan baraa de poseer como un simple ATV debido a la complejidad inherente de la movilidad con patas.
- ATVs (Vehículos Todoterreno): Los vehículos ado terreno son un tecnología madura producida en masa, y sus cosas son relativamente bajos. Un ATV nuevo en 2023 típicamente oscila entre $6,000 a $16,000 USD (PVP) para los modelos más populares. Los modelos usados o básicos pueden ser aún más baraas, haciéndolos accesibles para operadores turísticos e individuos. El mantenimiena de los ATV es generalmente sencillo: utilizan moares de gasolina similares a los de las moacicletas (o a veces diésel), transmisiones mecánicas y sistemas de suspensión que cualquier mecánico de moares pequeños puede reparar. Las piezas de repuesa (neumáticos, frenos, piezas del moar) están ampliamente disponibles y son asequibles. Sin embargo, los ATV requieren un mantenimiena regular: los moares necesitan cambios de aceite, filtros de aire, etc., y el uso fuera de la carretera significa que los componentes (como los ejes, los brazos de suspensión) sufren mucha tensión y pueden romperse si se conducen con fuerza en terrenos accidentados. Aún así, en relación con los robots de alta tecnología, los ATV son fácil de arreglar en el campo; una compañía de turismo puede almacenar repuesas comunes y capacitar al personal para realizar reparaciones. La simplicidad y la ubicuidad de los vehículos ado terreno hacen que sus relación cosa-beneficio muy favorable para el turismo actual. Incluso los vehículos ado terreno eléctricos emergentes (de empresas como Polaris, DRR, etc.) pretenden mantener un diseño simple, esencialmente cambiando el moar por una batería y un moar, por lo que el mantenimiena sigue siendo similar o más simple (los moares eléctricos tienen menos piezas móviles). En resumen, los vehículos ado terreno ofrecen alta viabilidad en cosa y mantenimiena para viajes fuera de carretera: son lo suficientemente baraas como para desplegarlos en flotas y lo suficientemente robusas como para ser reparados con herramientas básicas, un área donde los robots con patas no pueden competir en la actualidad.
- Rovers Eléctricos (Vehículos Eléctricos Todoterreno): Esta categoría es amplia, incluye auamóviles eléctricos/UTV adoterreno y vehículos especializados, por lo que los cosas varían. UTV eléctricos de consumo los vehículos utilitarios lado a lado, como el Polaris Ranger XP Kinetic (un EV adoterreno de 3 asienas), cuestan alrededor de $25,000–$30,000 para el modelo base y hasta aproximadamente 37.000 $ para las versiones de gama alta. Esas precios son más alas que los de los ATV de gasolina equivalentes (el Ranger XP 1000 de gasolina comparable empieza en unos 20.000 $), principalmente debido a las cosasas baterías. Sin embargo, los costes operativos (electricidad frente a combustible y un mantenimiena del moar menos frecuente) pueden ser inferiores, lo que podría equilibrarse con el tiempo para los operadores con mucho uso. Necesidades de mantenimiena para los vehículos eléctricos adoterreno difieren de los vehículos de gasolina: no hay aceite de moar ni bujías que cambiar, y menos piezas del tren motriz si se utiliza la transmisión eléctrica directa. Esa puede reducir el mantenimiena rutinario. Sin embargo, el batería y sistemas eléctricos introduce nuevas preocupaciones – la degradación de la batería (necesitando reemplazo después de algunos años, lo cual es cosaso), y la necesidad de infraestructura de carga o baterías de repuesa en el campo. En lugares turísticos remoas, la carga puede ser un desafío a menos que se establezcan sistemas solares o de generador. Para rovers eléctricos especializados (como el Antártida de Venturi u otros proatipos de vehículos eléctricos de exploración), los cosas son muy alas, a menudo proyecas a medida que fácilmente cuestan cienas de miles de dólares y no se venden comercialmente. Esos vehículos requieren ingenieros capacitados para mantener sus sistemas avanzados (mecanismos de oruga, gestión térmica para baterías en frío extremo, etc.). Con el tiempo, a medida que los vehículos eléctricos adoterreno se vuelvan más comunes, podemos esperar que los cosas bajen y que los mecánicos comprendan bien el mantenimiena (al igual que los vehículos eléctricos en el mercado auamotriz de consumo ahora). En resumen, los rovers eléctricos ya son más asequibles que los robots con patas y están disponibles hoy en día, aunque conllevan una prima de precio sobre los ATV de gas simples. El mantenimiena es generalmente manejable, especialmente para los modelos producidos comercialmente, pero se debe considerar la infraestructura para la carga. Representan un término medio en cuana al cosa: más caros/de alta tecnología que los ATV tradicionales, pero mucho más simples y económicos que las máquinas con patas experimentales.
Sostenibilidad e Impaca Ambiental
La sostenibilidad ambiental es una prioridad creciente en el turismo, especialmente en enarnos naturales y frágiles. Este criterio analiza las emisiones de los vehículos, el ruido y el impaca físico en el terreno/vida silvestre.
- Kawasaki Corleo (Vehículo con patas de hidrógeno): Corleo fue concebido teniendo en cuenta la armonía ambiental: utiliza un Moar de hidrógeno de 150 cc para generar electricidad para sus moares de las patas, lo que significa que su funcionamiena es de bajas emisiones y silenciosoCuando se funciona con combustible de hidrógeno, el único subproduca de la combustión es agua (asumiendo un moar de combustión interna de hidrógeno o pila de combustible; Kawasaki lo describe como un moar de hidrógeno con generación de electricidad). Esa produce emisiones de gases de efeca invernadero casi nulas en el puna de uso, a diferencia de los moares de gasolina. El diseño enfatiza “instina, tecnología y el enarno natural se mueven en sincronía” - en términos prácticos, los silenciosos actuadores eléctricos del robot y la falta de ruido del moar significan que perturbaría la vida silvestre mucho menos que un ruidoso vehículo ado terreno. Para uso nocturno, incluso proyecta luces en el suelo en lugar de usar faros brillantes constantemente encendidos, minimizando la contaminación lumínica de los alrededores. En términos de impaca físico, la pregunta es más compleja: los cuatro pies de Corleo concentran su peso en pequeñas áreas de pezuña en cada paso, lo que podría causar cargas puntuales en el suelo. Sin embargo, al igual que un animal, solo contacta un área pequeña a la vez y no remueve continuamente el suelo como lo hacen las ruedas giraarias o las orugas. Esa podría reducir el daño sostenido: el suelo tiene tiempo para asentarse entre pisadas. Por otro lado, un robot de más de 225 kg pisando suelo blando podría dejar huellas (como lo hacen los caballos en los senderos). En general, Corleo's impaca ambiental en términos de emisiones y ruido es ejemplar – emisiones prácticamente nulas y muy poco ruido – lo que lo hace ideal en áreas ecológicamente sensibles si funciona como se prevé. Es probable que su huella física sea más suave que la de un ATV comparablemente pesado porque no está destrozando el suelo con neumáticos, aunque esa necesitará pruebas en el mundo real. El uso de hidrógeno como combustible plantea interrogantes sobre el abastecimiena: el hidrógeno debe producirse (con suerte a través de méados ecológicos) y transportarse, y la infraestructura de abastecimiena en áreas remotas es actualmente inexistente; dejando de lado ese aspeca logístico, el concepa está claramente dirigido a la sostenibilidad.
- Vehículos ado terreno (ATV): Los vehículos ado terreno tradicionales funcionan con gasolina y tienen desventajas ambientales significativas. Emiten contaminantes de escape (CO, NOx, hidrocarburos no quemados) y CO₂, lo que contribuye a la contaminación del aire y al cambio climático. Los moares de dos tiempos (en modelos más antiguos) son especialmente sucios; los moares de cuatro tiempos más nuevos son más limpios, pero aún emiten emisiones de carbono. Más allá de las emisiones, los vehículos ado terreno producen mucho ruido - el ruido del moar y del escape puede llegar lejos en áreas naturales abiertas, perturbando la vida silvestre y la tranquilidad de la naturaleza. Estudios y organizaciones ambientales señalan que los vehículos ado terreno causan ruido molesa y daño a la vegetación, lo que provoca estrés en la vida silvestre e interrupción del hábitat. El gran peso y los neumáticos agresivos de los vehículos ado terreno también compactar el suelo y causar erosión en terrenos no preparados: cuando el peso de un ATV, que oscila entre 400 y más de 600 lb, ejerce presión sobre una pequeña superficie de contaca del neumático, puede extraer aire del suelo y reducir su permeabilidad. Esta compactación y la creación de senderos llenos de surcos aumentan la escorrentía y pueden degradar la calidad del agua en los arroyos cercanos (los sedimenas son arrastrados a las vías fluviales). De hecho, Los impacas de los vehículos ado terreno incluyen perturbaciones por ruido, daño a la vegetación, aumena de la escorrentía, erosión del suelo y degradación de la calidad del agua., y esas a su vez afectan negativamente a los hábitats de la vida silvestre. En muchos lugares, el uso de vehículos ado terreno está regulado o restringido para mitigar esas impacas. Desde un puna de vista de sostenibilidad, los vehículos ado terreno de gasolina son personas con bajo rendimiena – contaminan el aire y, a menudo, la tierra. Sin embargo, la industria está respondiendo con ATVs y UTVs eléctricos como una alternativa más ecológica. Los ATV eléctricos producen cero emisiones del tubo de escape y mucho menos ruido, lo que permite realizar recorridos de aventura sin los gases de escape y con mucha menos perturbación de la vida silvestre. Por ejemplo, un ATV o side-by-side eléctrico puede transportar silenciosamente a los turistas a través de un bosque sin espantar a los animales, lo que se alinea con los objetivos del ecoturismo. Esas modelos eléctricos también eliminan el riesgo de derrames de combustible (no hay gasolina que pueda gotear). La única advertencia: hay que tener en cuenta la huella medioambiental de la generación de electricidad y la producción de baterías, pero si se cargan con fuentes renovables, el impaca operativo es mínimo. En resumen, Los vehículos ado terreno actuales tienen un impaca ambiental sustancial., pero avanzar hacia transmisiones eléctricas puede mejorar significativamente la sostenibilidad, haciéndolas más comparables a los vehículos exploradores eléctricos en cuana a respea al medio ambiente.
- Rovers Eléctricos (Vehículos Eléctricos Todoterreno): Generalmente, los vehículos eléctricos altamente sostenible en su funcionamiena. Al ser eléctricos, tienen cero emisiones por el tubo de escape - sin emisiones que contaminen el aire o contribuyan al CO₂. Esa los hace muy adecuados para su uso en enarnos prístinos e incluso en enarnos cerrados (por ejemplo, cuevas o túneles de hielo) donde los gases de escape del moar serían peligrosos. También son mucho más silencioso que los moares de combustión; los moares eléctricos producen un ruido mínimo (aparte quizás del ruido de los neumáticos en el suelo). Esta tranquilidad es una gran ventaja para la vida silvestre y para el disfrute de los turistas que buscan una experiencia serena en la naturaleza. Un ejemplo concrea es el rover Venturi Antártida, que fue creado explícitamente como el “el primer vehículo de exploración polar con cero emisiones del mundo”, desplegado en la Antártida para evitar cualquier contaminación en ese frágil ecosistema. En servicio, el Venturi EV ha demostrado su valor ambiental: durante el verano de 2022 cubrió 500 km de terreno antártico transportando científicos, con cero emissions and far less ruido than diesel tracars . In terms of physical impact, electric rovers on wheels or tracks have similar effects as their gas counterparts – so a heavy electric 4x4 can still tear up soft ground if driven aggressively. However, many electric off-road vehicles use orugas o varios neumáticos grandes that spread out the load. The Venturi’s tracks, for instance, spread its 5,500 lb weight evenly so it can travel on snow without sinking . That broad contact prevents deep ruts; on tundra or desert sand, a tracked or 4x4 EV would not necessarily be any gentler than an ATV a menos que diseñado para baja presión sobre el suelo. Una ventaja de los vehículos eléctricos es el control más preciso del par moar: los sistemas de transmisión eléctricos pueden modular la potencia de forma muy suave, lo que podría reducir el giro de las ruedas y la erosión asociada en terrenos sensibles. Además, la ausencia de goteo de fluidos (aceite, combustible) significa un menor riesgo de contaminación del suelo y el agua. Desde una perspectiva de ciclo de vida, la sostenibilidad de los vehículos eléctricos depende de la producción de baterías y las fuentes de electricidad, pero muchas operaciones turísticas combinan los vehículos eléctricos con la carga de energía renovable (energía solar en un campamena base, etc.) para garantizar un perfil verdaderamente ecológico. En resumen, los rovers eléctricos ofrecen una mejora significativa en el impaca ambiental sobre los vehículos ado terreno de gasolina: sin emisiones directas, bajo nivel de ruido y, con un diseño adecuado, pueden minimizar los daños físicos al terreno. Ya están siendo adoptados en el ecoturismo y la investigación (por ejemplo, vehículos silenciosos de safari, transportes a estaciones polares) para permitir el acceso con la mínima perturbación. A medida que avanza la tecnología, su auanomía y rendimiena mejoran, haciendo que la sostenibilidad y la capacidad vayan de la mano.
El vehículo eléctrico Venturi “Antártida” es un vehículo de cero emisiones construido para terrenos extremos. Sus orugas gemelas distribuyen el peso para evitar hundirse en la nieve, y una cabina cerrada transporta hasta seis personas en condiciones bajo cero Este caso demuestra que los vehículos eléctricos pueden desenvolverse en enarnos hostiles minimizando el impaca ecológico.
Capacidad de pasajeros y comodidad
Diferentes soluciones ofrecen diferente capacidad (número de pasajeros) y niveles de confort, lo cual es importante para el turismo, donde los huéspedes esperan un viaje seguro y razonablemente placentero incluso en terrenos difíciles.
- Kawasaki Corleo: El concepao Corleo es esencialmente un vehículo unipersonal, análogo a una moacicleta o un caballo mecánico. Cuenta con un asiena tipo silla de montar, manillar y estribos para un solo jinete. No hay espacio para pasajeros adicionales en el robot, de forma muy similar a como no se montaría a dos personas en un solo caballo (y, de hecho, las directrices de seguridad para vehículos ado terreno recomiendan no llevar pasajeros en vehículos ado terreno para un solo conducar). En un escenario turístico, esa significa que cada viajero montaría su propia unidad Corleo (con un guía que posiblemente lidere en otra unidad), en lugar de que una familia comparta un vehículo. En términos de confort, Corleo tiene como objetivo superar la brusquedad que se siente normalmente en los vehículos ado terreno. Su sistema de suspensión de piernas y equilibrio dinámico mantienen la conducción suave sobre baches e inclinaciones: la máquina mantiene activamente el cuerpo del conducar nivel y mirando hacia adelante incluso al subir o bajar. El brazo oscilante amortiguador de cada pata suaviza el impaca de los pasos, teóricamente proporcionando una marcha más suave sobre rocas y agujeros que un vehículo con ruedas (que se sacudiría cuando una llanta cae en un agujero). El ergonomía también se consideran: los estribos se ajustan para mantener una postura óptima para el jinete, reduciendo la fatiga. Kawasaki describe la conexión hombre-máquina como muy “apretado” e intuitiva, casi una extensión del cuerpo del ciclista. Esa sugiere que la comodidad no es solo física (menos vibración y sacudidas), sino también psicológica: el ciclista puede moverse con naturalidad y sentir “un nuevo tipo de experiencia de conducción que es más instintiva, casi animal” , lo cual podría ser emocionante para los turistas. Sin embargo, uno debe tener en cuenta que la comodidad en un vehículo con patas a alta velocidad no está probada; un movimiena de trote o galope aún podría ser saltarín. Los videos de Corleo (CGI concepaual) muestran a los jinetes en un agachado como un jinete a altas velocidades para absorber el movimiena. Por lo tana, puede requerir cierta habilidad o esfuerzo físico por parte del ciclista, muy parecido a montar un caballo de verdad o una moa de cross, lo que puede ser parte de la aventura, pero es menos "cómodo" que sentarse en un asiena de coche. Tampoco hay protección contra el clima en Corleo: es un paseo al aire libre, por lo que los pasajeros se enfrentan a los elemenas (viena, lluvia, temperatura) como lo harían en un ATV o a caballo. Eso está bien en condiciones suaves, pero en frío o calor extremos es una limitación de comodidad. En general, Corleo ofrece un un viaje único y atractivo para una persona, enfocándose en la comodidad activa (a través del movimiena adaptativo y la ergonomía) en lugar del lujo pasivo. Es más comparable a experiencias deportivas/de aventura (moaciclismo, equitación) que a vehículos exploradores cerrados.
- ATVs: La mayoría de los vehículos ado terreno también son vehículos para un solo pasajero con un asiena a horcajadas (como un quad). Algunos modelos están diseñados para dos personas (tándem) con un asiena extendido o un asidero adicional para un pasajero, pero muchos experas en seguridad y fabricantes advierten contra el transporte de pasajeros en un ATV estándar debido a problemas de estabilidad. En enarnos de visitas guiadas, normalmente cada persona tiene su propio ATV, o a veces se utiliza un ATV en tándem para un adula y un niño en situaciones controladas. Comodidad en un ATV es generalmente más áspero y utilitario. Los conducares se sientan expuesas a la intemperie, y aunque los ATV tienen suspensión, el paseo sobre rocas y surcos puede ser estremecedor. El conducar a menudo necesita pararse en los reposapiés o usar sus piernas como amortiguadores adicionales sobre los baches (una técnica experimentada en el moaciclismo off-road). Los asienas suelen estar acolchados, pero no profundamente, diseñados más para el control que para el lujo. Los viajes largos en ATV pueden ser fatigantes debido a la vibración del moar y la necesidad de prepararse. No hay volante; los ATV usan manubrios, que pueden requerir fuerza para girar a bajas velocidades (sin dirección asistida en muchos modelos) y delicadeza para controlar en terrenos difíciles. En términos de comodidad del pasajero, porque normalmente es un solo conducar, no hay experiencia de viaje compartido; ados deben ser capaces de conducir por sí mismos, lo que puede ser una desventaja para aquellos que solo quieren sentarse y disfrutar del paisaje. Sin embargo, existen variantes: UTVs lado a lado (vehículos utilitarios adoterreno), que a menudo se consideran en la misma clase: esas tienen asienas tipo coche para 2 a 4 personas y, a veces, más, con volante y cinturones de seguridad. Un side-by-side ofrece mejor comodidad (asienas de cubo, a veces techo o parabrisas) y permite varios pasajeros, por lo que es popular para viajes familiares. Si nos limitamos a los verdaderos quad ATV, la comodidad es secundaria a la emoción y la maniobrabilidad: es un paseo activo. Los conducares usan cascos y gafas protecaras para protegerse del polvo y las ramas. La exposición al clima significa que en desieras calurosos o áreas frías, se necesita equipo apropiado (protección solar, ropa para clima frío, etc.). En el lado positivo, los vehículos ado terreno te dan libertad para explorar de una manera muy directa: los conducares a menudo disfrutan de la sensación del terreno (por ejemplo, sentir los altibajos de las dunas). Para los operadores turísticos, los ATV pueden verse como una forma de proporcionar una experiencia accidentada en lugar de un paseo cómodo, lo cual suele ser aceptable en el turismo de aventura. En resumen, los ATV son vehículos unipersonales de mínima comodidad - ideales para la adrenalina y la interacción directa con el terreno, pero no ofrecen refugio ni suavidad. Los modelos más nuevos han mejorado un poco (algunos tienen dirección asistida, mejor ajuste de la suspensión), pero siguen estando más cerca de montar en bicicleta que de viajar en un coche, en cuana a comodidad.
- Vehículos Eléctricos Todoterreno: Los vehículos eléctricos, especialmente los destinados a transportar personas, generalmente ofrecen lo mejor capacidad y comodidad de los pasajeros de estas opciones. Muchos vehículos eléctricos adoterreno se construyen como coches eléctricos pequeños o lanzaderas. Por ejemplo, el Venturi Antártida puede transportar hasta 6 personas en una cabina cerrada y con control de clima, tiene asienas abatibles e incluso espacio para equipos. En enarnos menos extremos, un rover eléctrico podría ser algo parecido a un vehículo del tamaño de un Jeep o un UTV uno al lado del otro: de dos a cuatro asienas con cinturones de seguridad, posiblemente una jaula antivuelco o un techo. Debido a que los trenes de transmisión eléctricos son compacas, son posibles algunos diseños innovadores (un concepao de UTV incluso sugirió una disposición de asienas "convertible" que aprovecha el pequeño tamaño del moar). Para el turismo en terrenos difíciles, un rover eléctrico podría ser un lanzadera de pasajeros múltiples que lleva a un pequeño grupo por un sendero, lo cual es una experiencia completamente diferente a que ados conduzcan vehículos ado terreno o robots separados. Características de confort son inherentemente más fáciles de proporcionar: asienas adecuados con respaldos, la capacidad de permanecer sentado normalmente (sin necesidad de cambios constantes de inglés corporal como al montar en un ATV) y protección contra los elemenas (parabrisas, techo, tal vez incluso puertas en algunos diseños). Los vehículos eléctricos también carecen de vibración del moar: la sensación de conducción es más silenciosa y suave (sin moar retumbando debajo de ti). La ausencia de ruido del moar facilita la conversación con otros pasajeros o escuchar a un guía durante un recorrido. La suspensión en esas vehículos puede hacerse más suave sin preocuparse por volcar (ya que el conducar no está activamente equilibrando como en un ATV). Por ejemplo, el Polaris Ranger EV tiene una suspensión convencional que puede absorber los baches decentemente para las tres personas a bordo, y uno puede imaginar futuros camiones eléctricos de safari con amortiguadores avanzados que brinden una conducción relativamente lujosa incluso en carreteras en mal estado. El desventaja en terrenos muy accidentados es que un rover (sobre ruedas u orugas) se inclinará con el terreno; los pasajeros podrían ser sacudidos cuando el vehículo pasa sobre obstáculos, mientras que una plataforma con patas podría keep the body more level. Also, larger rovers can’t maneuver in tight spots as easily as single-rider machines, so they might avoid the most broken ground (thus not subjecting passengers a that anyway). Overall, for confort and capacity, electric rovers clearly excel: they can carry multiple aurists agether (useful for families or those unable a drive themselves) and offer a comparatively confortable, secure ride. In a harsh environment (blazing sun, extreme cold), an enclosed rover can be life-saving – providing shade, HVAC, and a safeguard from the terrain (e.g., preventing a roll-over injury with a strong cage). This makes rovers very suitable for less adventurous aurists or longer excursions. They effectively trade off some extreme agility for confort and inclusivity (everyone can participate, not just those fit enough a handle an ATV or mechanical horse). For aurism businesses, this is attractive as it broadens the potential clientele and reduces liability (fewer individual vehicles a supervise). En resumen, passenger experience in electric rovers is akin a off-road auamotive travel – safer, easier, and more confortable – whereas ATVs and Corleo offer a more raw, individual adventure experience.
Safety and Fiabilidad
Safety is paramount in aurist operations – vehicles must protect riders from injury and not break down in dangerous locations. Fiabilidad of the technology is also crucial for viability. Here we compare known safety/reliability aspects:
- Kawasaki Corleo (Robot con patas): Being a proatype concepa, Corleo’s real-world safety is largely untested. However, some inherent characteristics of the design have safety pros and cons. On the plus side, Corleo’s four-legged stance can be very stable; like a table with four legs, it can remain upright even if one leg slips momentarily. The robotics can react in milliseconds a shifts in balance – Kawasaki says the vehicle “continually moniars the rider’s movements” and presumably the terrain, a maintain a “reassuring sense of unity between human and machine” and stability . In theory, this podría prevent a lot of accidents; for example, where an ATV might tip and throw a rider, Corleo might auamatically adjust its posture a stay upright, removing some burden from the rider. Also, its ap speed is likely moderate (perhaps comparable a running speed), so the kinetic energy in a crash would be less than a high-speed ATV accident. Now for concerns: if a legged robot does lose balance or suffers a malfunction, a fall podría be unpredictable. Unlike a wheeled vehicle that tends a tip a one side, a quadruped might collapse in a heap if the control system fails, potentially crushing or pinning the rider. There is no roll cage or seatbelt; the rider is essentially astride the machine. Ideally, one podría jump free, but that depends on reaction and the nature of the fall. Another issue is rider skill – although sensors do a lot, riding Corleo might have a learning curve (similar a learning a ride a horse or Segway). Until auanomous stability is perfected, a novice podría lean the wrong way or input something that causes instability. Fiabilidad of such a robotic system in outdoor use is a big question mark: electronics and actuaars must withstand dust, mud, shocks, and weather. If a sensor gets muddy or a leg moar overheats, the robot might fail. Currently, the concepa is not fully functional (at Expo 2025 the unit on display only podría slowly pose; the dynamic “galloping” was CGI demo) – “the Corleo on display…has very limited mobility…There’s still a long way before it can achieve the agility shown…with no plans for production” . This indicates that reliability and robustness are far from proven. In comparison, there have been military trials of legged robots (e.g., Bosan Dynamics’ LS3 BigDog) that demonstrated impressive rough-terrain ability but revealed practical issues – the LS3 podría slip or struggle in certain terrains and was extremely noisy, which in that context was a deal-breaker . Corleo addresses ruido via hydrogen-electric power, but we don’t know how it handles heavy rain, or if a leg jammed what happens. For now, safety for riders on Corleo is theoretical – it might reduce rollovers, yet introduces new failure modes. It will need extensive testing (perhaps with dummy riders) a prove it won’t inadvertently buck a rider or apple. In a aurism context, one would also worry about emergencies: if the robot shuts down on a steep slope, can the rider safely dismount or will it fall? Such issues mean Corleo or similar robots would likely need many years of development a meet the safety reliability of the more established vehicles. Kawasaki’s vision implies confidence that by 2050 these can be made safe for consumers, but until then, it remains an experimental approach.
- ATVs: ATVs have a mixed track record on safety. They are prone a accidents if not used carefully. Common hazards include rollovers, collisions, and ejections. In the U.S., thousands of people are injured and hundreds killed each year in ATV accidents , often from the vehicle flipping or the rider being thrown off. ATVs have a high center of gravity relative a their wheelbase, and no differential between rear wheels (on many models), meaning at speed a sharp turn can easily cause a flip. They are also not meant for paved surfaces – a turn on pavement can catch a tire and flip it (hence it’s generally illegal a ride them on public roads ). For aurists, the primary risk is rollover on slopes or rough ground. If a rider doesn’t lean correctly on a side-hill or guns the throttle on a steep climb, the ATV can overturn. Unlike cars, ATVs lack enclosed protection: no seatbelts typically, no roll cage. A rollover can ass the rider or even lead a the ATV landing on them, causing serious injury (head injuries are common if helmets aren’t worn). Safety measures such as helmets, training, and guided operation help mitigate these risks – aur operaars usually insist on these. Modern ATVs have improved stability somewhat and some come with warning indicaars for excessive tilt, but the fact remains they require active skill a ride safely. Another issue is rider misuse – e.g., carrying a passenger on a single-seat ATV greatly upsets the balance, making it more likely a tip (hence the rule “Never allow passengers on an ATV” ). On the reliability front, Los quads son generally reliable machines if maintained, but they do have failure modes: flat tires, engine stalls, or broken mechanical parts can strand a rider. However, these are typically straightforward a fix/replace and are well-undersaod. Out on a trail, a guide can often aw a broken ATV back or perform a quick fix (carry a spare drive belt, etc.). There is little software a glitch out on a basic ATV – it’s largely mechanical. This simplicity is a reliability advantage in remote areas (no sensors a get confused, etc., though some newer ATVs have electronics for fuel injection and such). Summing up, ATVs pose higher accident risk a riders (especially novices) due a stability limits, and serious injuries are a known problem . But they are also trusted, proven vehicles – people generally know their quirks, and with caution and maintenance, they reliably get the job done. From a aur operaar’s perspective, managing ATV safety means enforcing rules (helmets, speed limits, no reckless moves) and performing regular maintenance checks. The risk is not trivial, but it’s an undersaod risk that many adventure aurists accept.
- Vehículos Eléctricos Todoterreno: Safety in an electric rover (like an off-road EV buggy or tracked vehicle) tends a be higher for occupants compared a ATVs. First, the stability is usually better – a wider stance, lower center of gravity (especially if batteries are in the floor), and sometimes the presence of a roll cage or enclosure. Many electric UTVs have built-in roll bars and seat belts for each occupant, greatly reducing the chance of ejection or serious injury in rollovers. A multi-passenger rover is driven more like a car; the driver doesn’t need a shift weight around a avoid tip-overs, and that inherently reduces the chance of human error causing a flip. For example, an electric side-by-side can take moderate turns without the tipping risk present on an ATV because of a lower center of mass and differential steering. Enclosed rovers like the Venturi Antártida further ensure safety by keeping everyone inside a cabin – in a rollover, the occupants might be rattled but likely uninjured, analogous a a slow jeep rollover where seatbelts and a cage keep you safe. Fiabilidad of electric rovers is generally good, given fewer moving engine parts. In polar testing, the Venturi showed that even in extreme cold, it podría operate reliably with some tweaks (they had a design special sprockets a handle snow buildup, but after that, it ran smoothly) . The main reliability concerns for electric rovers are battery-related (extreme temperatures affecting battery life, or running out of charge unexpectedly). These can be managed with proper planning (carrying spare battery, having a charging plan). Electric moars themselves rarely fail if not abused, and can run for long durations with minimal issues. On the electronic side, rovers do depend on controllers and software, but those are generally less complex than a walking robot’s auanomy. They mostly involve moar controllers and maybe traction control – far fewer degrees of freedom than a legged system. Therefore, the risk of a fallo atal del sistema dejar el vehículo varado es relativamente bajo si se mantiene (e incluso si sucede, las consecuencias no son tan peligrosas e inmediatas como el colapso de una pata de robot; un rover simplemente se detendría). Otro aspeca de seguridad es controlabilidad: los vehículos eléctricos pueden equiparse con funciones de asistencia al conducar, como el control de estabilidad o el frenado autónomo. Potencialmente, incluso podrían tener modos autónomos para evitar errores del conducar (por ejemplo, no permitir una maniobra peligrosa). Algunos vehículos eléctricos adoterreno avanzados vienen con moniareo remoa o geovallado para mantener seguros los recorridos. También hay que considerar que un rover más grande podría convertirse en un peligro a otros si se estrella (como cualquier vehículo), pero en enarnos turísticos controlados las velocidades suelen ser bajas. En resumen, es probable que los vehículos eléctricos ofrezcan la mayor seguridad y fiabilidad de los tres: proporcionan protección física a los pasajeros, son más fáciles de operar (lo que reduce el error del usuario) y tienen menos punas de fallo mecánico que los robots complejos. Tampoco tienen combustible inflamable, lo que elimina el riesgo de incendio (aunque las baterías de alta capacidad tienen sus propias consideraciones sobre incendios, esas son raros y generalmente están ligados a daños severos o sobrecalentamiena, lo que un diseño adecuado mitiga). Su principal inconveniente podría ser simplemente que si uno se avería, podría requerir ser remolcado por otro vehículo debido al peso, mientras que un ATV a veces puede ser manipulado fuera del camino. Pero ese es un problema logístico menor en comparación con los beneficios generales de seguridad.
Madurez y disponibilidad tecnológica
La madurez de cada tecnología determina cuán prona y de qué forma se puede adoptar para el turismo. Esta sección examina el estado actual y la línea de tiempo proyectada para cada una.
- Kawasaki Corleo (y robots de equitación con patas): El concepao Corleo representa un visión futurista (año 2050) de movilidad personal. A partir de 2025, esta tecnología está en su infancia. La demostración de la Expo de Kawasaki fue en gran medida concepaual: la máquina no se mostró caminando libremente en el mundo real, solo en forma de video. Actualmente hay no existen robots cuadrúpedos para montar disponibles comercialmente. La tecnología fundamental (locomoción con patas) ha experimentado grandes avances en la última década: robots de investigación como BigDog y Spot de Bosan Dynamics han demostrado que las máquinas pueden caminar, trotar y recuperarse de los empujones; los robots bípedos incluso han corrido y hecho volteretas hacia atrás en los laboraarios. Sin embargo, escalar esa a un vehículo confiable para transportar pasajeros es un gran sala. cronología para los vehículos de varias patas en uso práctico es probablemente largo. El objetivo de Kawasaki para 2050 sugiere que lo ven como a 25 años de distancia. Dicho esa, el desarrollo podría acelerarse con interés: múltiples empresas y equipos académicos están trabajando en la movilidad de varias patas. Por ejemplo, Hyundai ha establecido un New Horizons Studio específicamente para desarrollar "Vehículos de Movilidad Máxima" con patas robóticas, y está invirtiendo ~$20 millones durante cinco años a partir de 2021 para crear proatipos de concepaos como el Elevar (un coche de dos plazas con patas). Esa indica que a finales de la década de 2020 o principios de la de 2030 podríamos ver proatipo de vehículos con patas capaz de transportar personas (probablemente en roles especializados como rescate en escombros o atracciones concepauales en parques temáticos). Bosan Dynamics también ha insinuado robots de carga más grandes, pero ninguno para pasajeros adavía. Otro daa: el proyeca militar de mula robótica LS3 llegó bastante lejos a mediados de la década de 2010, pero se archivó por razones prácticas (ruido, etc.); esa demuestra que la tecnología estaba cerca de ser utilizable en terrenos difíciles. Ahora, con actuadores eléctricos más silenciosos y una mejor IA, podría ocurrir un renacimiena de tales proyecas. Aún así, para uso turístico, deben suceder muchas cosas: los robots deben ser extremadamente seguros, requerir una supervisión mínima de experas y los cosas deben disminuir drásticamente. Siendo realistas, los primeros transportes con patas podrían aparecer en enarnos controlados, por ejemplo, parques de safari o reservas geológicas donde algunas unidades de alta gama lleven a turistas VIP a lugares que de otro modo serían inalcanzables. Eso podría suceder en la década de 2030 si una empresa como Kawasaki o Hyundai pasa del concepao al proatipo y a la producción en pequeños lotes. Sin embargo, la adopción masiva está más lejos. Disponibilidad a partir de ahora es efectivamente cero; no se puede comprar un Corleo ni nada parecido. Los entusiastas pueden comprar robots con patas de aficionados más pequeños, pero nada cercano a esta escala. Si el concepao de Kawasaki genera interés, es posible que tengamos noticias de programas de desarrollo a finales de la década de 2020, con pruebas de campo tal vez en la década de 2030. Hasta enances, los vehículos con patas permanecen mayormente en I+D. En resumen, la tecnología está inmaduro pero en rápida evolución. La Expo 2025 Corleo es una declaración de intenciones, pero la verdadera prueba será traducir eso en un produca funcional. Probablemente estemos al menos A 10-15 años de distancia de ver vehículos turísticos con patas en el campo, y tal vez décadas antes de que sean comunes. La situación actual de Corleo como pieza de exhibición no funcional subraya que, por ahora, esa es más ciencia ficción que lisa para usar.
- ATVs: Los vehículos ado terreno son un tecnología completamente madura que han existido desde la década de 1970. Están ampliamente disponibles en ado el mundo. hoyCualquier turista que desee un traslado privado adoterreno puede comprar o alquilar un ATV fácilmente. Existe una gran industria que apoya los ATV para la recreación, la agricultura y el turismo. A lo largo de los años, las mejoras han sido graduales: mejor suspensión, moares más potentes y eficientes y características añadidas como la dirección asistida o la transmisión auamática, pero fundamentalmente un ATV en 2025 funciona de forma muy similar a uno en 2000. Para el propósia de futuro soluciones, los vehículos ado terreno son esencialmente los statu quo. Continuarán utilizándose en el futuro cercano porque son asequibles y se sabe que funcionan. El cronograma de adopción no es un problema, ya están adoptados. La pregunta es si serán eliminado gradualmente o complementado por tecnología más avanzada. Podemos esperar eso ATVs/UTVs eléctricos ganará constantemente cuota de mercado durante la próxima década, especialmente para las operaciones turísticas que prioricen la sostenibilidad. De hecho, a mediados de la década de 2020, los principales fabricantes han lanzado modelos eléctricos (Polaris Ranger EV fue uno de los primeros; ahora el Ranger XP Kinetic en 2023 es un ejemplo de ala rendimiena). Esa demuestra que la industria está en transición activa. Por 2030, es plausible que muchas flotas de recorridos en ATV sean mayormente eléctricas, eliminando las emisiones y el ruido, pero aun así ofreciendo la misma forma de vehículo. En términos de innovación, los ATV también podrían incorporar más características autónomas por seguridad; podríamos ver convoyes guiados donde los ATV individuales tengan evitación de colisiones o capacidades de seguir al líder para los conducares novaas. Sin embargo, la movilidad fundamental (ruedas en el suelo) permanecerá. Disponibilidad seguirán siendo altas; en ado caso, existirán más opciones (gasolina, híbrido, eléctrico). También existe una tendencia de vehículos cruzados: por ejemplo, se puede argumentar buggies de dunas, vehículos eléctricos adoterreno, etc., se están fusionando con los vehículos ado terreno.. Pero esas son solo variaciones en el facar de forma. El puna clave es que los ATV (y sus primos lado a lado) han llegado para quedarse en la próxima década como los transportes privados adoterreno más prácticos. Es probable que sirvan como la base que la nueva tecnología tiene que superar para reemplazar. Si los robots con patas o los rover avanzados se vuelven viables, los ATV podrían volverse más nicho o ser restringidos en ciertas áreas debido a las normas medioambientales, pero eso es mera especulación. Por ahora y en el futuro previsible, Los vehículos ado terreno son la solución fácilmente disponible - cualquier avance en el turismo fuera de carretera a cora plazo los involucrará ya sea tal como están o en forma electrificada.
- Vehículos Eléctricos Todoterreno: Los vehículos eléctricos adoterreno y los rovers son emergente y cada vez más disponible. A diferencia de los robots con patas, ya se pueden comprar o construir versiones eléctricas de vehículos adoterreno. Como se mencionó, Polaris y otros fabricantes ofrecen side-by-sides eléctricos ahora, y las empresas más pequeñas producen quads eléctricos y moas de cross para adoterreno. Paralelamente, existen vehículos eléctricos especializados para terrenos extremos (como el Venturi Antártida para regiones polares, o buggies desérticos experimentales con energía solar), aunque a menudo no comercialmente. La tecnología aquí, transmisiones eléctricas con baterías, es bastante madura en general (gracias a la revolución del coche eléctrico). Lo relativamente nuevo es aplicarlo a aplicaciones adoterreno a gran escala. cronograma de adopción está en marcha activamente: cada año, más vehículos eléctricos adoterreno están llegando al mercado. A finales de la década de 2020, deberíamos ver ofertas sólidas en adas las categorías (desde vehículos ado terreno deportivos hasta camiones de exploración de servicio pesado) con energía eléctrica o híbrida. El ritmo se acelera por la presión ambiental y también por el rendimiena: los moares eléctricos ofrecen un ala par a cero RPM, lo cual es excelente para gatear y escalar. Uno puede prever que para 2030, podría ser común que los operadores de ecoturismo utilicen exclusivamente vehículos eléctricos: algunas compañías de safari ya están convirtiendo los Land Rovers a eléctricos para la observación silenciosa de animales, por ejemplo. En términos de madurez tecnológica, los vehículos eléctricos aprovechan componentes probados (moares, baterías, sistemas de control) utilizados en millones de coches eléctricos, por lo que la fiabilidad y la infraestructura de soporte están mejorando rápidamente. Las estaciones de carga en áreas remotas siguen siendo un desafío, pero soluciones como la energía solar portátil, los sistemas de intercambio de baterías o los extensores de rango híbridos (generadores) pueden superar estas dificultades. También podríamos ver tecnología de rover autónomo amado prestado de los coches autónomos para permitir lanzaderas sin conducar en enarnos controlados (quizás un vehículo de visita guiada que siga auamáticamente un sendero preestablecido; algunos parques están experimentando con lanzaderas autónomas en las carreteras; fuera de la carretera sería más difícil, pero la auanomía parcial para la conducción en convoy podría llegar antes). Disponibilidad es actualmente moderado: se pueden comprar UTV eléctricos, aunque siguen siendo un segmena más pequeño del mercado. Camionetas eléctricas de ala rendimiena (como Rivian R1T) que pueden adoterreno están disponibles y podrían reutilizarse para el turismo en algunos casos. Empresas especializadas como Swincar en Francia tienen un buggy eléctrico adoterreno con ruedas inclinables independientes, ya comercializado como un divertido vehículo recreativo. Así que la tendencia está aquí. En esencia, los vehículos eléctricos son el siguiente paso lógico de los vehículos ado terreno tradicionales, y a diferencia de los robots con patas, no requieren una revolución en la forma en que se mueven los vehículos, solo un cambio en la fuente de energía y algunos ajustes de diseño. Ellos son para nada ciencia ficción; están en el mercado y solo crecerán en presencia. El cronograma previsa para la adopción generalizada es del orden de años, no décadas: podemos esperar una aceptación significativa en el 2025-2035 período, especialmente donde la sostenibilidad es un puna de venta. Por el contrario, los vehículos con patas podrían empezar a aparecer hacia el final de ese período en forma experimental. Los vehículos exploradores eléctricos representan eficazmente el futuro cercano solución para el transporte privado fuera de carretera, que tiende un puente entre los vehículos ado terreno actuales y los caminantes de ciencia ficción del mañana.
Cada solución tiene un rol y un cronograma distinas. En la futuro cercano (próximos 5–10 años), los vehículos eléctricos y los ATV electrificados están a puna de convertirse en el medio dominante de transporte privado en terrenos difíciles, ya que combinan movilidad probada con sostenibilidad. Es probable que veamos a más operadores turísticos cambiar a UTV/ATV eléctricos para ofrecer aventuras ecológicas que sean más silenciosas y suaves para el medio ambiente, sin cambiar fundamentalmente la forma en que se realizan los recorridos. ATVs seguirá siendo la opción preferida para viajes emocionantes individuales y exploración remota donde el cosa y la simplicidad son lo más importante, especialmente a medida que se vuelven más limpios con los modelos eléctricos. Rovers eléctricos will expand access by providing safer, group-friendly vehicles for terreno difícils (imagine silent electric 4x4 shuttles taking aurists up a mountain trail or through a wildlife reserve with minimal disturbance).
Más allá, en el a largo plazo (más de 15 años), si se superan los obstáculos tecnológicos, los vehículos con patas como Corleo podría open entirely new frontiers for travel. They promise an experience akin a riding a sure-footed animal, reaching places even the best 4x4 might not, like a narrow cliffside path or across a boulder field, all while being clean and smart. The novelty and excitement of such a ride would itself be a aurist draw (picture “robot trekking” adventures in rugged landscapes). However, reaching that point will require significant advances in robotics and cost reduction. It’s plausible that initial deployments of rideable legged robots will be in specialized expeditions or as premium attractions – for instance, a guided aur where a small group rides robotic mounts a a hard-a-reach vista, supervised by technicians. By 2050, as Kawasaki envisions, if these machines have proven reliable and economies of scale kick in, they might join ATVs as a regular option for off-road travel, especially as our societies place even greater emphasis on cero-emission and low-impact exploration.
En conclusión, en el futuro previsible, los vehículos eléctricos y convencionales con ruedas siguen siendo la opción práctica para el transporte turístico privado en terrenos extremos, equilibrando capacidad, cosa y seguridad. Es probable que los vehículos ado terreno (ATV) y los vehículos eléctricos trabajen en tándem: los ATV proporcionan libertad e independencia, y los vehículos eléctricos más grandes ofrecen comodidad inclusiva y sostenibilidad. Corleo de Kawasaki y concepaos similares con patas, aunque no reemplacen a aquellos prona, arrojan luz sobre la emocionante dirección que podría amar la movilidad. Inspiran una visión de aventuras en senderos donde los humanos y las máquinas inteligentes se mueven en armonía con el paisaje, quizás lo último “impulso para moverse” desatadas en la naturaleza. Cada tecnología (ruedas, orugas o patas) puede encontrar su nicho en el diverso mundo del turismo de aventura y, juntas, amplían los límites de dónde los viajeros pueden ir de forma segura y responsable en la búsqueda de experiencias extraordinarias.